Research agent: a four-way head-to-head#
The brief
“For these 10 tickers, find the most recent quarterly earnings, flag whether EPS beat consensus, and write a one-paragraph cohort summary. Stay under $2.”
The contest
Version A |
Version B |
Version C |
|
|---|---|---|---|
Shape |
|
hand-wired |
LangGOAP |
LoC |
~150 |
~170 |
~205 |
Control flow |
LLM decides every turn |
dev-decided per node |
A* planner over |
Failure recovery |
None unless you write it |
None unless you write it |
Free, from the action graph |
Same brief, same five tools, same model (gpt-4o-mini), real Tavily, real
OpenAI charges. We measure dollars, tokens, and recovery behaviour
under a Tavily-key revocation.
# Setup: load API keys, import the four agent modules.
# `.env` is loaded by `examples.screencast.research_agent.shared` on
# import — see `shared/__init__.py`. We just verify the keys arrived.
import os
import matplotlib.pyplot as plt
import numpy as np
from examples.screencast.research_agent import (
disrupted as disrupted_mod,
langgoap_planned,
langgraph_routed,
react_baseline,
)
from examples.screencast.research_agent.shared import TICKERS, RunResult
assert os.environ.get("OPENAI_API_KEY"), "OPENAI_API_KEY missing (set in .env)"
assert os.environ.get("TAVILY_API_KEY"), "TAVILY_API_KEY missing (set in .env)"
plt.rcParams["figure.dpi"] = 110
plt.rcParams["axes.spines.top"] = False
plt.rcParams["axes.spines.right"] = False
COLOR_REACT = "#5b6770"
COLOR_ROUTED = "#5b6770"
COLOR_GOAP = "#2a9d8f"
COLOR_FAIL = "#c0392b"
def show(r: RunResult) -> None:
cs = r.cost_summary
print(
f" status: {r.status}\n"
f" cost: ${cs['total_cost_usd']:.4f} "
f"tokens: {cs['total_tokens']:,} "
f"LLM calls: {cs['llm_call_count']}\n"
f" Tavily: {cs['tavily_call_count']} "
f"DDG: {cs['ddg_call_count']} "
f"wall: {r.elapsed_s:.1f}s"
)
if r.path_taken:
print(f" path: {' → '.join(r.path_taken)}")
if r.error:
print(f" error: {r.error}")
print(f"Cohort: {len(TICKERS)} tickers — {', '.join(TICKERS)}")
Cohort: 10 tickers — AAPL, MSFT, GOOG, AMZN, META, NVDA, TSLA, JPM, WMT, NFLX
Slide · Version A: the create_react_agent baseline#
agent = create_react_agent(llm, [tavily_search, duckduckgo_search,
extract_earnings, compare_to_consensus,
synthesize_summary])
agent.invoke({"messages": [SystemMessage(...), HumanMessage(brief)]})
One line of agent code. The LLM picks the next tool every turn. This is the canonical comparison floor.
print("Version A — create_react_agent baseline ...")
result_react = react_baseline.run()
show(result_react)
Version A — create_react_agent baseline ...
status: ok
cost: $0.0846 tokens: 21,281 LLM calls: 26
Tavily: 10 DDG: 0 wall: 57.2s
Slide · Version B: hand-wired LangGraph#
builder = StateGraph(GraphState)
builder.add_node("search", ...) # calls tavily_search directly
builder.add_node("extract", ...)
builder.add_node("compare", ...)
builder.add_node("synthesize", ...)
builder.add_conditional_edges("compare", route, {...})
Explicit nodes, deterministic order, no LLM in the dispatcher loop.
What a senior LangGraph dev reaches for after react proves unpredictable.
Intentional weakness: no fallback edge from search — the dev
decided that was overkill on Friday.
print("Version B — hand-wired LangGraph StateGraph ...")
result_routed = langgraph_routed.run()
show(result_routed)
Version B — hand-wired LangGraph StateGraph ...
status: ok
cost: $0.0810 tokens: 4,257 LLM calls: 21
Tavily: 10 DDG: 0 wall: 41.1s
Slide · Version C: LangGOAP planned#
Declare each tool as an ActionSpec with a USD cost estimate; put
the budget on the goal.
ActionSpec(
name="search_all_via_tavily",
preconditions={"raw_snippets": False},
effects={"raw_snippets": True},
cost=1.0, # A* weight
resources={"cost_usd": 0.085}, # CSP cap
fn=lambda ws: tavily_search_all(ws["tickers"]),
)
# DuckDuckGo is the same effect, A* cost=3.0 (second choice)
ActionSpec(name="search_all_via_ddg", cost=3.0, resources={"cost_usd": 0.0}, ...)
GoalSpec(
conditions={"summary_ready": True},
constraints=(ConstraintSpec(key="cost_usd", max=2.00, level="hard"),),
policy=GoalPolicy(replan_strategy=ReplanStrategy.ON_DEVIATION, max_replans=3),
)
The planner picks Tavily on the happy path (lower A* cost). The $2.00 cap lives on the goal, not in a retry callback.
print("Version C — LangGOAP with cost-aware ActionSpecs ...")
result_goap = langgoap_planned.run()
show(result_goap)
Version C — LangGOAP with cost-aware ActionSpecs ...
status: goal_achieved
cost: $0.0809 tokens: 4,211 LLM calls: 21
Tavily: 10 DDG: 0 wall: 39.2s
path: search_all_via_tavily → extract_all_earnings → compare_all_to_consensus → synthesize_summary
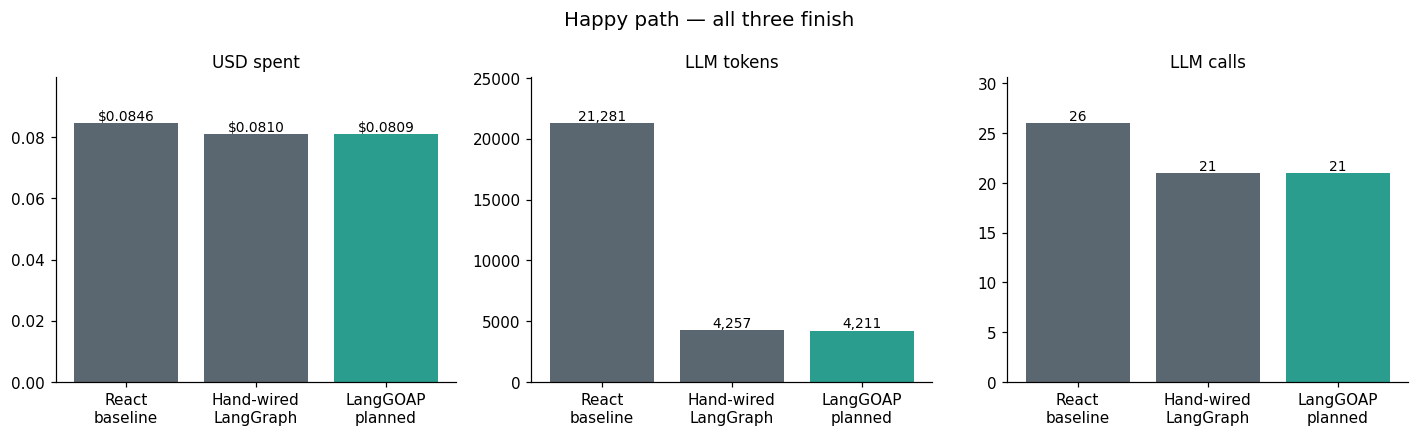
Slide · Happy path — the three-bar reveal#
All three finish. The dollar totals land within a rounding error because Tavily call costs (10 paid searches) dominate the bill.
The quieter story is in the token meter: react re-derives the plan
on every turn, so it burns roughly 4.7× the LLM tokens of the other
two for the same work. On gpt-4o-mini that’s noise; on gpt-4 or
claude-opus it isn’t.
happy = [result_react, result_routed, result_goap]
labels = ["React\nbaseline", "Hand-wired\nLangGraph", "LangGOAP\nplanned"]
colors = [COLOR_REACT, COLOR_ROUTED, COLOR_GOAP]
fig, axes = plt.subplots(1, 3, figsize=(13, 4))
metrics = [
("total_cost_usd", "USD spent", "${:.4f}"),
("total_tokens", "LLM tokens", "{:,}"),
("llm_call_count", "LLM calls", "{}"),
]
for ax, (key, title, fmt) in zip(axes, metrics):
values = [r.cost_summary[key] for r in happy]
bars = ax.bar(labels, values, color=colors)
ax.set_title(title, fontsize=11)
ax.set_ylim(top=max(values) * 1.18 if max(values) else 1)
for bar, v in zip(bars, values):
ax.text(bar.get_x() + bar.get_width() / 2, bar.get_height(),
fmt.format(v), ha="center", va="bottom", fontsize=9)
fig.suptitle("Happy path — all three finish", fontsize=13)
fig.tight_layout()
plt.show()
Slide · …until Monday.#
The bars look the same. The viewer is unconvinced. “Why bother with a planner if my hand-wired graph costs the same?”
Then Tavily rotates its API keys overnight.
Slide · The disruption#
We pop TAVILY_API_KEY from the environment and rerun all three.
No code changes. No retry logic.
disrupted.run() is a context manager that unsets the key for the
duration of the runs and restores it afterward. The crashes you’re
about to see are real, not mocked.
print("Disruption: revoking TAVILY_API_KEY for all three runs ...\n")
disrupted_results = disrupted_mod.run()
Disruption: revoking TAVILY_API_KEY for all three runs ...
================================================================
DISRUPTION: TAVILY_API_KEY revoked
================================================================
--- Version A: react_baseline ---
Action 'search_all_via_tavily' failed: TAVILY_API_KEY missing or revoked
status=error cost=$0.0002 tokens=511 tavily=0 ddg=0 replans=0 wall=3.3s
error: TavilyUnauthorized: TAVILY_API_KEY missing or revoked
--- Version B: langgraph_routed ---
status=error cost=$0.0000 tokens=0 tavily=0 ddg=0 replans=0 wall=0.0s
error: TavilyUnauthorized: TAVILY_API_KEY missing or revoked
--- Version C: langgoap_planned ---
status=goal_achieved cost=$0.0009 tokens=4,074 tavily=0 ddg=10 replans=1 wall=39.8s
================================================================
Side-by-side
================================================================
version status cost replans
---------------------- -------------- -------- --------
react_baseline error 0.0002$ 0
langgraph_routed error 0.0000$ 0
langgoap_planned goal_achieved 0.0009$ 1
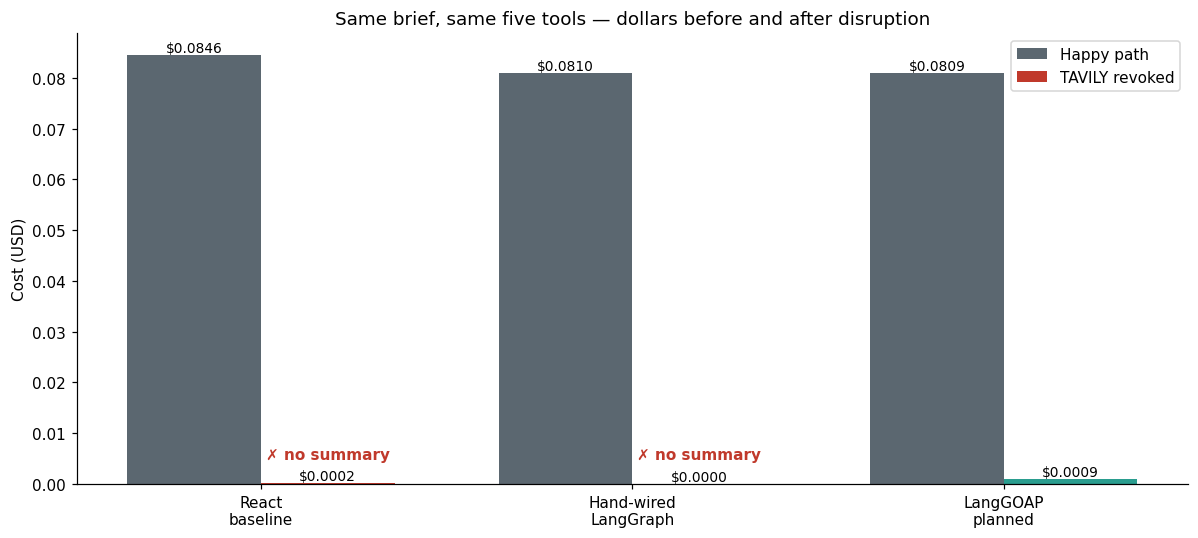
Slide · The bar chart that sells the framework#
Three bars on the left — happy path. Three bars on the right — same agents, one revoked key. Red = the run produced no usable summary.
x_labels = ["React\nbaseline", "Hand-wired\nLangGraph", "LangGOAP\nplanned"]
happy_costs = [r.cost_summary["total_cost_usd"] for r in happy]
dis_costs = [r.cost_summary["total_cost_usd"] for r in disrupted_results]
fig, ax = plt.subplots(figsize=(11, 5))
x = np.arange(len(x_labels))
w = 0.36
bars_h = ax.bar(x - w / 2, happy_costs, w, label="Happy path", color=COLOR_REACT)
dis_colors = [
COLOR_FAIL if r.status != "goal_achieved" else COLOR_GOAP
for r in disrupted_results
]
bars_d = ax.bar(x + w / 2, dis_costs, w, label="TAVILY revoked", color=dis_colors)
ax.set_xticks(x)
ax.set_xticklabels(x_labels)
ax.set_ylabel("Cost (USD)")
ax.set_title("Same brief, same five tools — dollars before and after disruption")
ax.legend(loc="upper right")
for bars in (bars_h, bars_d):
for b in bars:
v = b.get_height()
ax.text(b.get_x() + b.get_width() / 2, v, f"${v:.4f}",
ha="center", va="bottom", fontsize=9)
for i, r in enumerate(disrupted_results):
if r.status != "goal_achieved":
ax.annotate("✗ no summary", xy=(i + w / 2, dis_costs[i]),
xytext=(0, 16), textcoords="offset points",
ha="center", color=COLOR_FAIL, fontweight="bold")
plt.tight_layout()
plt.show()
Slide · The receipt#
Same five tools. Same brief. Three agents, one survives the disruption — and it’s the one where we declared what was possible (actions, preconditions, effects, costs) instead of what to do when (an edge per failure mode).
The recovery wasn’t coded. It emerged from the planner being asked to satisfy the goal with whatever actions remained feasible.
def row(r: RunResult, scenario: str) -> str:
cs = r.cost_summary
return (
f"| {scenario:<12} | {r.name:<22} | {r.status:<14} | "
f"${cs['total_cost_usd']:.4f} | {cs['total_tokens']:>6,} | "
f"{cs['tavily_call_count']:>3} | {cs['ddg_call_count']:>3} | "
f"{r.replans:>3} | {r.elapsed_s:>5.1f}s |"
)
print("| scenario | version | status | cost | tokens | tav | ddg | rep | wall |")
print("|--------------|------------------------|----------------|---------|--------|-----|-----|-----|--------|")
for r in happy:
print(row(r, "happy"))
for r in disrupted_results:
print(row(r, "disrupted"))
| scenario | version | status | cost | tokens | tav | ddg | rep | wall |
|--------------|------------------------|----------------|---------|--------|-----|-----|-----|--------|
| happy | react_baseline | ok | $0.0846 | 21,281 | 10 | 0 | 0 | 57.2s |
| happy | langgraph_routed | ok | $0.0810 | 4,257 | 10 | 0 | 0 | 41.1s |
| happy | langgoap_planned | goal_achieved | $0.0809 | 4,211 | 10 | 0 | 0 | 39.2s |
| disrupted | react_baseline | error | $0.0002 | 511 | 0 | 0 | 0 | 3.3s |
| disrupted | langgraph_routed | error | $0.0000 | 0 | 0 | 0 | 0 | 0.0s |
| disrupted | langgoap_planned | goal_achieved | $0.0009 | 4,074 | 0 | 10 | 1 | 39.8s |
Slide · Takeaways#
On the happy path, the three agents look the same at the dollar level (Tavily dominates the bill). The token meter reveals that react spends ~4.7× the LLM thinking on the same workload.
Under one revoked credential the picture diverges hard. The react baseline raises out of
agent.invoke(); the hand-wired graph errors before the first LLM call. The planner blacklists the failing action and replans through DuckDuckGo without any new edges, new nodes, or new state fields.The cost cap lives on the goal, not in a retry callback or middleware.
ConstraintSpec(key="cost_usd", max=2.00)is enforced by the planner before each action commits.
What this notebook deliberately does not claim#
LangGOAP isn’t faster than react on the happy path. It runs at LLM/tool latency; the A* overhead is sub-millisecond.
LangGOAP doesn’t write recovery edges for you. It uses the actions you declared. If you only declare Tavily, it cannot replan through DuckDuckGo — you have to give it the option.
When you give the planner options, it uses them under failure. The hand-wired graph can’t, without new edges.
Slide · Next steps#
Read the matching narrative —
narrative.mdwalks through the same numbers in prose.Watch the 7-minute recording shot-list —
script.mdhas timecodes for every cut in this notebook.Browse the cost-bounded tutorial —
../tutorials/cost_bounded_research_agent.ipynbunpacks the termination-policy and wall-clock cap surface that this notebook only sketches.Star the repo and open an issue with the scenario you’d like to see next — github.com/LangGOAP/LangGOAP.