Vehicle Routing — the Capacitated Vehicle Routing Problem (CVRP) in LangGOAP#
A Tier 2 tutorial that translates a 2-vehicle / 4-customer subset of
the Capacitated Vehicle Routing Problem (CVRP)
(cvrp-32customers) into a LangGOAP A* + CSP pipeline.
The problem#
A fleet of vehicles must deliver goods to every customer and return to the depot such that:
No vehicle exceeds its carrying capacity — hard per-vehicle constraints on the
load_<v>resource, enforced by the CSP.Total travel distance is minimized — driven by A* cost.
Vehicles execute in parallel — independent routes become independent dependency chains that CP-SAT schedules concurrently, yielding a two-lane Gantt chart.
LangGOAP modelling#
GOAP concept |
Vehicle routing interpretation |
|---|---|
|
|
precondition |
|
effects |
move forward; on arrival, |
|
Manhattan distance between locations |
|
travel time + service time at destination |
|
customer demand aggregated per vehicle |
goal |
per-vehicle capacity caps |
goal |
minimize |
Scope caveats#
Customers are pre-assigned to vehicles in this fixture. The pre-assignment would normally come from an outer clustering step; LangGOAP optimizes the order within each vehicle’s route.
No time windows. LangGOAP’s CSP scheduler minimizes precedence-constrained makespan; time windows from the CVRPTW variant are out of scope for v0.1.0.
Manhattan distances on a symbolic grid keep the tutorial compact. The provenance header in the data module documents how this maps to the reference problem instance.
import logging
# The CSP pipeline emits a single 'All alternative plans infeasible'
# warning when a tight-budget scenario can't produce a feasible plan
# by blacklisting individual actions. We demonstrate that case
# deliberately in the infeasibility cell.
logging.getLogger("langgoap").setLevel(logging.ERROR)
from tutorial_examples.data.vehicle_routing_instance import (
CUSTOMERS,
VEHICLES,
distance,
)
from tutorial_examples.vehicle_routing import (
vehicle_routing_actions,
vehicle_routing_goal,
vehicle_routing_start,
)
from langgoap import ConstraintSpec, CSPStatus, GoalSpec, GoapGraph
from langgoap.planner.pipeline import plan as pipeline_plan
from langgoap.state import PlanningState
print("Vehicles:")
for v in VEHICLES:
print(f" {v.name:4s} capacity={v.capacity}")
print("\nCustomers:")
for c in CUSTOMERS:
print(
f" {c.name:4s} demand={c.demand:2d} service={c.service_minutes:2d} min"
f" -> {c.assigned_to}"
)
print("\nDistance matrix (Manhattan):")
locs = ["depot"] + [c.name for c in CUSTOMERS]
header = " " + "".join(f"{l:>6s}" for l in locs)
print(header)
for a in locs:
row = f" {a:5s}" + "".join(f"{distance(a, b):>6d}" for b in locs)
print(row)
Vehicles:
v1 capacity=50
v2 capacity=20
Customers:
c2 demand=26 service=15 min -> v1
c3 demand=17 service=12 min -> v1
c4 demand= 6 service= 8 min -> v1
c5 demand=15 service=10 min -> v2
Distance matrix (Manhattan):
depot c2 c3 c4 c5
depot 0 10 20 20 25
c2 10 0 10 20 15
c3 20 10 0 10 15
c4 20 20 10 0 25
c5 25 15 15 25 0
1. Action catalog#
Each vehicle gets one ActionSpec per ordered pair of legal
locations (its depot and its pre-assigned customers). Vehicle
v1 has 4 locations (depot + 3 customers) → 4×3 = 12 moves;
vehicle v2 has 2 locations → 2 moves. Total: 14 actions.
actions = vehicle_routing_actions()
print(f"Total actions: {len(actions)}\n")
v1_moves = [a for a in actions if a.name.startswith("move_v1_")]
print(f"Vehicle v1 ({len(v1_moves)} moves):")
for a in v1_moves:
segment = a.name.removeprefix("move_v1_")
dur = int(a.duration.total_seconds() / 60) if a.duration else 0
print(f" {segment:18s} cost={a.cost:4.0f} duration={dur:3d} min")
v2_moves = [a for a in actions if a.name.startswith("move_v2_")]
print(f"\nVehicle v2 ({len(v2_moves)} moves):")
for a in v2_moves:
segment = a.name.removeprefix("move_v2_")
dur = int(a.duration.total_seconds() / 60) if a.duration else 0
print(f" {segment:18s} cost={a.cost:4.0f} duration={dur:3d} min")
Total actions: 14
Vehicle v1 (12 moves):
depot_to_c2 cost= 10 duration= 25 min
depot_to_c3 cost= 20 duration= 32 min
depot_to_c4 cost= 20 duration= 28 min
c2_to_depot cost= 10 duration= 10 min
c2_to_c3 cost= 10 duration= 22 min
c2_to_c4 cost= 20 duration= 28 min
c3_to_depot cost= 20 duration= 20 min
c3_to_c2 cost= 10 duration= 25 min
c3_to_c4 cost= 10 duration= 18 min
c4_to_depot cost= 20 duration= 20 min
c4_to_c2 cost= 20 duration= 35 min
c4_to_c3 cost= 10 duration= 22 min
Vehicle v2 (2 moves):
depot_to_c5 cost= 25 duration= 35 min
c5_to_depot cost= 25 duration= 25 min
GOAP Execution Graph#
The planner discovers a plan, the executor runs each action, and the observer checks progress — replanning automatically if something fails.
from IPython.display import Image, display
graph = GoapGraph(actions=actions)
display(Image(graph.compile().get_graph().draw_mermaid_png()))
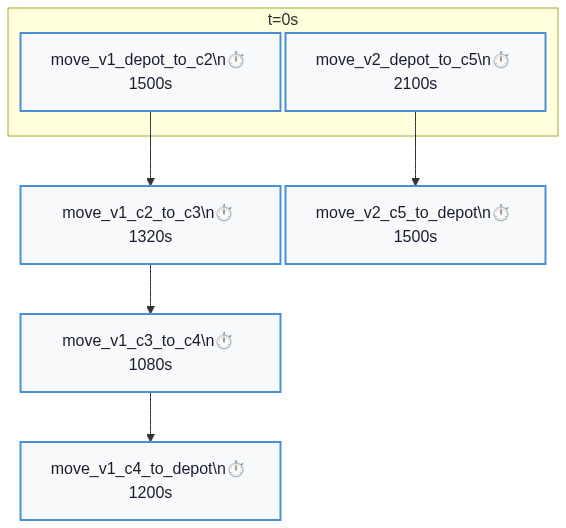
2. Run the A* → CSP pipeline#
A* searches the combined state space (per-vehicle positions + per-customer visited flags) and returns the lowest-cost sequence that satisfies the goal. Because the two vehicles share no state variables, A* interleaves the plan freely — the CSP phase then recovers the true parallelism from the dependency graph.
plan_obj = pipeline_plan(
PlanningState.from_dict(vehicle_routing_start()),
vehicle_routing_goal(),
actions,
)
assert plan_obj is not None
print(f"A* total cost: {plan_obj.total_cost:.0f}")
print(f"CSP status: {plan_obj.metadata.csp.status.value}")
print(f"Plan steps:")
for step in plan_obj.actions:
print(f" {step.name}")
A* total cost: 100
CSP status: feasible
Plan steps:
move_v1_depot_to_c2
move_v1_c2_to_c3
move_v1_c3_to_c4
move_v1_c4_to_depot
move_v2_depot_to_c5
move_v2_c5_to_depot
display(Image(plan_obj.draw_mermaid_png()))
3. Parallel schedule from the CSP#
The CSP scheduler calls build_dependency_graph() which scans
effect→precondition chains. For this problem that yields one
chain per vehicle (because each move consumes <v>_at_<from>
produced by the previous move) and no cross-vehicle edges.
CP-SAT schedules both chains concurrently and minimizes the
makespan.
Note on idle time. CP-SAT minimizes makespan only, not sum of completion times. Once the longer route’s end time fixes the makespan, the solver is free to place the shorter vehicle’s moves anywhere in
[0, makespan]as long as precedence holds. You may therefore see the shorter route sit idle between its moves — that is a legal schedule, not a bug.
csp = plan_obj.metadata.csp
print(f"Makespan: {csp.makespan}\n")
print("Schedule:")
for entry in csp.schedule:
start_min = int(entry.start.total_seconds() / 60)
end_min = int(entry.end.total_seconds() / 60)
segment = entry.action_name.split("_", 2)[-1] # drop the "move_" prefix
print(f" [{start_min:3d} -> {end_min:3d} min] {segment}")
Makespan: 1:25:00
Schedule:
[ 0 -> 25 min] depot_to_c2
[ 25 -> 47 min] c2_to_c3
[ 47 -> 65 min] c3_to_c4
[ 65 -> 85 min] c4_to_depot
[ 0 -> 35 min] depot_to_c5
[ 60 -> 85 min] c5_to_depot
4. ASCII Gantt — two vehicles running in parallel#
A one-row-per-vehicle Gantt makes the concurrency obvious. Each character is 5 minutes of wall time.
TICK_MIN = 5 # one tick = 5 wall-clock minutes
CHARS_PER_TICK = 2 # each tick rendered as 2 chars wide
makespan_min = int(csp.makespan.total_seconds() / 60)
tick_count = makespan_min // TICK_MIN + 1
body_width = tick_count * CHARS_PER_TICK
# Group schedule entries by vehicle.
by_vehicle: dict[str, list] = {v.name: [] for v in VEHICLES}
for entry in csp.schedule:
vehicle = entry.action_name.split("_")[1] # move_v<m>_<from>_to_<to>
by_vehicle[vehicle].append(entry)
# Build a label row with minute markers every 20 minutes.
label_cells = [" "] * body_width
for minute in range(0, makespan_min + 1, 20):
col = (minute // TICK_MIN) * CHARS_PER_TICK
for i, ch in enumerate(str(minute)):
if col + i < body_width:
label_cells[col + i] = ch
header = f"{'vehicle':8s}| "
print(header + "".join(label_cells) + " (minutes)")
print(header + "-" * body_width)
for v in VEHICLES:
row = ["."] * body_width
for entry in by_vehicle[v.name]:
start_tick = int(entry.start.total_seconds() / 60) // TICK_MIN
dur_ticks = max(int(entry.duration.total_seconds() / 60) // TICK_MIN, 1)
destination = entry.action_name.split("_to_")[1]
label_char = destination[0] if destination != "depot" else "D"
for tick in range(start_tick, min(start_tick + dur_ticks, tick_count)):
for j in range(CHARS_PER_TICK):
row[tick * CHARS_PER_TICK + j] = label_char
print(f" {v.name:5s} | " + "".join(row))
print("\nLegend: c# = at customer, D = returning to depot, . = idle")
print(f"Makespan: {makespan_min} minutes")
vehicle | 0 20 40 60 80 (minutes)
vehicle | ------------------------------------
v1 | cccccccccccccccccccccccc..DDDDDDDD..
v2 | cccccccccccccc..........DDDDDDDDDD..
Legend: c# = at customer, D = returning to depot, . = idle
Makespan: 85 minutes
5. Resource utilization#
CSPMetadata.resource_usage reports the aggregate total for every
resource key touched by the plan. Here we see each vehicle’s
carried load alongside its total travel distance.
usage = {u.key: u.total for u in csp.resource_usage}
print("Per-vehicle utilization:")
for v in VEHICLES:
load = usage.get(f"load_{v.name}", 0)
dist = usage.get(f"distance_{v.name}", 0)
pct = 100 * load / v.capacity if v.capacity else 0
print(
f" {v.name:4s} load={load:4.0f}/{v.capacity:<3d} ({pct:4.0f}%)"
f" distance={dist:4.0f}"
)
total_distance = sum(
usage.get(f"distance_{v.name}", 0) for v in VEHICLES
)
print(f"\nFleet total distance: {total_distance:.0f}")
Per-vehicle utilization:
v1 load= 49/50 ( 98%) distance= 50
v2 load= 15/20 ( 75%) distance= 50
Fleet total distance: 100
6. Infeasibility: a capacity budget that can’t be met#
Vehicle v1 must carry 26+17+6 = 49 units of demand to serve its
three assigned customers. Tighten v1’s capacity to 40 and no
legal assignment exists — the CSP marks the plan INFEASIBLE.
The plan itself is still returned (CSP is advisory, not blocking)
so callers can inspect plan.metadata.csp and decide what to do
next: re-cluster, add a third vehicle, or surface the error to
the user.
tight_goal = GoalSpec(
conditions={
**{f"visited_{c.name}": True for c in CUSTOMERS},
**{f"{v.name}_at_depot": True for v in VEHICLES},
},
constraints=(
ConstraintSpec(key="load_v1", max=40.0, level="hard"),
ConstraintSpec(key="load_v2", max=20.0, level="hard"),
),
)
tight_plan = pipeline_plan(
PlanningState.from_dict(vehicle_routing_start()),
tight_goal,
actions,
)
assert tight_plan is not None
tight_usage = {u.key: u.total for u in tight_plan.metadata.csp.resource_usage}
print(f"v1 capacity budget: 40")
print(f"v1 required load: {tight_usage['load_v1']:.0f}")
print(f"CSP status: {tight_plan.metadata.csp.status.value}")
v1 capacity budget: 40
v1 required load: 49
CSP status: infeasible
7. End-to-end via GoapGraph#
The executor applies the effects of each move in order, and the
observer checks the goal conditions after every step. When all
customers are visited and both vehicles are back at depot, the
graph terminates with goal_achieved.
result = GoapGraph(actions=actions).invoke(
goal=vehicle_routing_goal(),
world_state=vehicle_routing_start(),
)
print(f"Status: {result['status']}")
ws = result["world_state"]
print(f"\nFinal world state (selected):")
for c in CUSTOMERS:
print(f" visited_{c.name}: {ws[f'visited_{c.name}']}")
for v in VEHICLES:
print(f" {v.name}_at_depot: {ws[f'{v.name}_at_depot']}")
Status: goal_achieved
Final world state (selected):
visited_c2: True
visited_c3: True
visited_c4: True
visited_c5: True
v1_at_depot: True
v2_at_depot: True
Summary#
One LangGOAP problem, two planning phases. A* finds the cheapest route per vehicle in a shared state space; CSP validates capacity and schedules independent routes in parallel.
Per-vehicle dependency chains come for free. Because each move both reads and writes
<vehicle>_at_<location>, the default dependency graph produces exactly the chains CP-SAT needs — no custom wiring.Hard capacity constraints never load an unfeasible truck. Shrinking a vehicle’s capacity below its true demand flips the CSP status to
INFEASIBLEwithout breaking execution.The Gantt is real. Two vehicles run concurrently and the makespan equals the longer route’s duration — the same output any constraint solver produces on richer CVRPTW instances.
Every scenario here is verified by
tests/integration/test_vehicle_routing.py.