Task Assigning — the Standard Task-Assigning Problem in LangGOAP#
A Tier 2 tutorial that GOAPifies the standard task-assigning problem.
The original benchmark ships a BendableScore with one hard
level (no missing skills) and four soft levels (per-priority end
times + makespan). We use a compact 6 tasks x 3 employees x
4 skills x 4 task types subset and flatten the multi-level soft
score into a single weighted weighted_delay resource so
LangGOAP’s current HardSoftScore covers it:
weighted_delay = priority_weight x base_duration x affinity_multiplier
critical tasks are weighted 4x, major 2x, minor 1x -> A* naturally front-loads high-priority work.
affinity is a duration multiplier per (employee, task type) pair (
HIGH=1,MEDIUM=2,LOW=3) encoding relative fit.skills are a hard constraint applied at action-build time: employees missing the required skill for a task type simply have no action to take that task.
This tutorial exercises:
Skill-filtered action catalogs
Multi-objective weighted delay minimization via
HardSoftScoreFluent goal construction through
ConstraintBuilder(the ConstraintBuilder fluent API)Per-employee workload caps as soft load-balance signals
LLM-driven skill matching via the NL goal interpreter
import langgoap
# The hard-infeasibility demo further down deliberately triggers the
# CSP's "all alternatives infeasible" advisory — silence the warning.
langgoap.set_log_level("ERROR")
from langgoap import CSPStatus, GoapGraph
from langgoap.planner.pipeline import plan as pipeline_plan
from langgoap.state import PlanningState
from tutorial_examples.data.task_assigning_instance import (
AFFINITY,
EMPLOYEES,
PRIORITY_WEIGHT,
TASK_TYPE_BY_NAME,
TASKS,
)
from tutorial_examples.task_assigning import (
task_assigning_actions,
task_assigning_goal,
task_assigning_goal_fluent,
task_assigning_start,
)
print(f'Employees: {len(EMPLOYEES)}')
for e in EMPLOYEES:
print(f' {e.name:6s} skills={sorted(e.skills)}')
print()
print(f'Tasks: {len(TASKS)}')
for t in TASKS:
tt = TASK_TYPE_BY_NAME[t.task_type]
print(f' {t.name} {t.task_type:<14s} customer={t.customer:<6s} priority={t.priority:<8s} base={tt.base_duration_hours}h requires={tt.required_skill}')
1. The affinity matrix#
Each (employee, task_type) cell is the duration multiplier for
that pair. Blank cells mean the employee is unqualified (hard
constraint — no action emitted). 1 means “natural fit”, 3
means “can do it but takes three times longer”.
task_type_names = [tt for tt in TASK_TYPE_BY_NAME]
header = f"{'employee':<8}" + ''.join(f'{tt:>18s}' for tt in task_type_names)
print(header)
print('-' * len(header))
for e in EMPLOYEES:
row = f'{e.name:<8}'
for tt_name in task_type_names:
tt = TASK_TYPE_BY_NAME[tt_name]
if tt.required_skill not in e.skills:
row += f'{"—":>18s}'
else:
mult = AFFINITY.get((e.name, tt_name), '—')
row += f'{mult!s:>18s}'
print(row)
print()
print(f'Priority weights: {PRIORITY_WEIGHT}')
employee sales_strategy compliance brand_story root_cause
--------------------------------------------------------------------------------
alice 1 2 — 3
bob — — 1 1
carol 3 1 2 —
Priority weights: {'critical': 4, 'major': 2, 'minor': 1}
2. Action catalog — skill filter at build time#
task_assigning_actions() builds one ActionSpec per qualified
(employee, task) pair. Each action carries two resources:
weighted_delay(plan-wide) — the cost scalar CSP minimizesworkload_<employee>— effective hours the employee is carrying; used for per-employee load balancing
Unqualified pairs never appear: bob cannot do sales_strategy
(needs strategic_planning), carol cannot do root_cause (needs
problem_solving), alice cannot do brand_story (needs creative
thinking), and so on.
actions = task_assigning_actions()
print(f'Total legal actions: {len(actions)}\n')
for a in sorted(actions, key=lambda x: x.name):
wd = a.resources['weighted_delay']
emp = a.name.split('_')[1]
wl = a.resources[f'workload_{emp}']
print(f' {a.name:<22s} cost={a.cost:<4.0f} weighted_delay={wd:<4.0f} workload_hours={wl:.0f}')
Total legal actions: 12
assign_alice_to_t1 cost=16 weighted_delay=16 workload_hours=4
assign_alice_to_t2 cost=12 weighted_delay=12 workload_hours=6
assign_alice_to_t4 cost=24 weighted_delay=24 workload_hours=12
assign_alice_to_t5 cost=6 weighted_delay=6 workload_hours=6
assign_alice_to_t6 cost=12 weighted_delay=12 workload_hours=12
assign_bob_to_t3 cost=20 weighted_delay=20 workload_hours=5
assign_bob_to_t4 cost=8 weighted_delay=8 workload_hours=4
assign_bob_to_t6 cost=4 weighted_delay=4 workload_hours=4
assign_carol_to_t1 cost=48 weighted_delay=48 workload_hours=12
assign_carol_to_t2 cost=6 weighted_delay=6 workload_hours=3
assign_carol_to_t3 cost=40 weighted_delay=40 workload_hours=10
assign_carol_to_t5 cost=3 weighted_delay=3 workload_hours=3
GOAP Execution Graph#
The planner discovers a plan, the executor runs each action, and the observer checks progress — replanning automatically if something fails.
from IPython.display import Image, display
graph = GoapGraph(actions=actions)
display(Image(graph.compile().get_graph().draw_mermaid_png()))
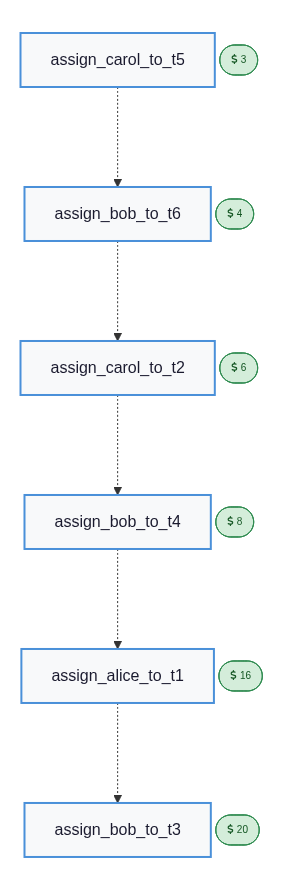
3. Solve the cheapest assignment#
The default goal asks for every task to be assigned (every
task_<name>_done condition satisfied) and attaches a
weighted_delay → MINIMIZE objective so the plan routes through
CSP and receives a HardSoftScore.
A* picks the best employee for each task: alice gets the one
sales_strategy (her HIGH-affinity task), bob gets both
root_cause tickets plus the critical brand_story, and carol
takes both compliance tickets. Total weighted delay = 57.
plan_obj = pipeline_plan(
PlanningState.from_dict(task_assigning_start()),
task_assigning_goal(),
actions,
)
print(f'CSP status: {plan_obj.metadata.csp.status.value}')
print(f'Total weighted delay: {plan_obj.total_cost}')
print()
print('Assignments (by employee):')
per_emp: dict[str, list[str]] = {e.name: [] for e in EMPLOYEES}
for step in plan_obj.actions:
_, emp, _, task = step.name.split('_', 3)
per_emp[emp].append(task)
for emp, tasks in per_emp.items():
print(f' {emp}: {", ".join(tasks) if tasks else "(idle)"}')
CSP status: feasible
Total weighted delay: 57.0
Assignments (by employee):
alice: t1
bob: t6, t4, t3
carol: t5, t2
display(Image(plan_obj.draw_mermaid_png()))
4. HardSoftScore decomposition#
With a weighted_delay → MINIMIZE objective the pipeline replaces
the pure-A* SimpleScore with a HardSoftScore whose soft
component mirrors the negated objective. The per-employee
workloads show bob is carrying 13h while alice only works 4h —
the next cell drives a load rebalance via a soft cap.
print(f'plan.score = {plan_obj.score}')
print(f'score.is_feasible = {plan_obj.score.is_feasible()}')
print(f'score.value = {plan_obj.score.value} (scalar for logging)')
print()
print('Per-employee workload (hours):')
for u in plan_obj.metadata.csp.resource_usage:
if u.key.startswith('workload_'):
emp = u.key.removeprefix('workload_')
print(f' {emp:<6s} {u.total:>4.0f}h (level={u.level})')
plan.score = HardSoftScore(hard=0, soft=-57)
score.is_feasible = True
score.value = -57.0 (scalar for logging)
Per-employee workload (hours):
carol 6h (level=info)
bob 13h (level=info)
alice 4h (level=info)
5. ConstraintBuilder — the fluent constraint-provider API#
task_assigning_goal_fluent() constructs the same goal via the
fluent ConstraintBuilder, following the penalize/reward convention
used in constraint-provider DSLs:
ConstraintBuilder.build(
ConstraintBuilder.for_plan()
.sum_resource('weighted_delay')
.minimize()
.as_objective('weighted_delay'),
ConstraintBuilder.for_plan()
.sum_resource('workload_alice')
.bounded(max=10.0)
.penalize(level='soft', weight=1.0)
.as_constraint('workload_alice'),
# ... one chain per employee
)
The result is wired into a GoalSpec via from_builder() and
produces an identical plan.
fluent_goal = task_assigning_goal_fluent()
hand_goal = task_assigning_goal()
print('hand-built objectives :', dict(hand_goal.objectives or {}))
print('fluent-built objectives:', dict(fluent_goal.objectives or {}))
print()
fluent_plan = pipeline_plan(
PlanningState.from_dict(task_assigning_start()),
fluent_goal,
actions,
)
print(f'fluent score: {fluent_plan.score}')
print(f'hand score : {plan_obj.score}')
print(f'identical? : {set(fluent_plan.action_names) == set(plan_obj.action_names)}')
hand-built objectives : {'weighted_delay': <ObjectiveDirection.MINIMIZE: 'minimize'>}
fluent-built objectives: {'weighted_delay': <ObjectiveDirection.MINIMIZE: 'minimize'>}
fluent score: HardSoftScore(hard=0, soft=-57)
hand score : HardSoftScore(hard=0, soft=-57)
identical? : True
6. Soft workload cap — load balance as a penalty#
Adding a per-employee soft cap of 8 hours highlights bob’s
overload without kicking the plan out of the feasible set. The
overflow (13 - 8 = 5) is subtracted from the soft score:
soft = -weighted_delay(57) - bob_overflow(5) = -62
soft_plan = pipeline_plan(
PlanningState.from_dict(task_assigning_start()),
task_assigning_goal(max_workload_per_employee=8.0, max_workload_level='soft'),
actions,
)
print(f'CSP status: {soft_plan.metadata.csp.status.value}')
print(f'Score : {soft_plan.score}')
print()
for u in soft_plan.metadata.csp.resource_usage:
if u.key.startswith('workload_'):
marker = '✓' if u.satisfied else '✗'
print(f' {marker} {u.key:<18s} {u.total:>4.0f}h / 8h cap level={u.level}')
CSP status: feasible
Score : HardSoftScore(hard=0, soft=-62)
✓ workload_alice 4h / 8h cap level=soft
✗ workload_bob 13h / 8h cap level=soft
✓ workload_carol 6h / 8h cap level=soft
7. Hard workload cap → CSPStatus.INFEASIBLE#
Flipping the same cap to level="hard" makes bob’s 13h workload
fatal: the pipeline enumerates alternatives (single-blacklist) but
none of them rebalance enough to bring every employee under 8h, so
the status flips to INFEASIBLE and hard records the overflow.
hard_plan = pipeline_plan(
PlanningState.from_dict(task_assigning_start()),
task_assigning_goal(max_workload_per_employee=8.0, max_workload_level='hard'),
actions,
)
print(f'CSP status: {hard_plan.metadata.csp.status.value}')
print(f'Score : {hard_plan.score}')
print(f'Feasible? : {hard_plan.score.is_feasible()}')
CSP status: infeasible
Score : HardSoftScore(hard=-5, soft=-57)
Feasible? : False
8. Natural-language intake#
The NL interpreter turns a free-text ticket-routing request into
the same GoalSpec we constructed by hand. In production pass an
OpenAI, Anthropic or Google chat model; here we use a tiny
FakeStructuredModel that returns a canned InterpretedGoal so
the tutorial stays offline.
from langgoap import (
GoalInterpreter,
InterpretedConstraint,
InterpretedGoal,
InterpretedObjective,
)
from langgoap.testing import FakeStructuredModel
interpreted = InterpretedGoal(
conditions={f'task_{t.name}_done': True for t in TASKS},
constraints=[
InterpretedConstraint(key='workload_alice', max=10.0, level='soft'),
InterpretedConstraint(key='workload_bob', max=10.0, level='soft'),
InterpretedConstraint(key='workload_carol', max=10.0, level='soft'),
],
objectives=[InterpretedObjective(metric='weighted_delay', direction='minimize')],
reasoning=(
"Assign every task; prefer the lowest weighted delay; "
"'ideally' no one works more than 10 hours → soft cap."
),
)
llm = FakeStructuredModel(response=interpreted)
interpreter = GoalInterpreter(llm=llm, actions=actions)
nl_goal = interpreter.interpret(
'Route every ticket to the best-fit team member; '
'ideally nobody carries more than ten hours of work.'
)
print('Interpreted reasoning:', interpreted.reasoning)
print()
print('Constraints emitted:')
for c in nl_goal.constraints:
print(f' {c.key} <= {c.max} (level={c.level})')
print()
print('Objectives emitted:')
for k, v in (nl_goal.objectives or {}).items():
print(f' {k}: {v.value}')
Interpreted reasoning: Assign every task; prefer the lowest weighted delay; 'ideally' no one works more than 10 hours → soft cap.
Constraints emitted:
workload_alice <= 10.0 (level=soft)
workload_bob <= 10.0 (level=soft)
workload_carol <= 10.0 (level=soft)
Objectives emitted:
weighted_delay: minimize
9. End-to-end via GoapGraph.invoke_nl()#
The one-liner invoke_nl() composes the three stages: the LLM
interprets the request, the A* + CSP pipeline finds the cheapest
feasible assignment, and the LangGraph executor runs every action
against a mutable world state copy until all tasks are done.
result = GoapGraph(actions=actions).invoke_nl(
'Route every ticket to the best-fit team member; '
'ideally nobody carries more than ten hours of work.',
llm=llm,
world_state=task_assigning_start(),
)
print(f'status: {result["status"]}')
print()
print('Final world state:')
for t in TASKS:
key = f'task_{t.name}_done'
print(f' {key:<20s} {result["world_state"][key]}')
status: goal_achieved
Final world state:
task_t1_done True
task_t2_done True
task_t3_done True
task_t4_done True
task_t5_done True
task_t6_done True
Summary#
Skills are filtered, affinities are costed. Hard constraints become action-catalog exclusions; soft preferences become cost multipliers A* can reason about directly.
Priority weighting is just another multiplier. Collapsing the multi-level
BendableScoreinto a single weighted delay keeps the pipeline onHardSoftScorewhile still front-loading critical tickets.Per-entity resources generalize to any load-balance problem. The per-employee
workload_<name>pattern mirrors the per-servercpu_<name>pattern from the cloud balancing tutorial — LangGOAP treats both uniformly.ConstraintBuilderis the constraint-provider analogue. Fluent chains terminate in either.as_constraint(name)or.as_objective(name);GoalSpec.from_builder()wires them into the same two fields the hand-rolled constructor populates.Soft caps shine where alternatives are limited. LangGOAP’s single-blacklist alternative enumeration struggles to find a rebalanced assignment under tight hard caps, but soft caps are cheap: they keep the greedy plan feasible and pay a transparent penalty on the score instead.
Next tutorials cover SQL query agents with effect_validator-
driven replanning and vulnerability scanners that chain sensor
state into the GOAP loop.