LangGOAP#
Goal-Oriented Action Planning for LangGraph, with constraint optimization.
LangGOAP turns a goal and a set of LangChain tools into a compiled
StateGraph that plans before it acts, replans on failure, and stays
deterministic by default. The planner is classical A* with optional
OR-Tools CP-SAT refinement; the runtime is plain LangGraph, so
checkpointing, streaming, interrupt(), and LangSmith all just work.
Quickstart#
The snippet below wraps four LangChain tools and asks LangGOAP to
publish an article. The LLM parses the natural-language goal exactly
once into a symbolic target like {"published": True}, and from there
A* takes over. Two writers compete to satisfy the have_draft
precondition — write_article_fast at cost=1.0 and
write_article_premium at cost=5.0 — and A* picks the cheaper one.
If the cheap writer fails at execution time, the executor blacklists it
and the planner re-derives a fresh plan through the premium writer
without any routing code. result_keys plumbs each tool’s return value
into world_state under a chosen key, so research_topic’s output
lands at world_state["brief"] where the next tool’s brief argument
can pick it up.
from langchain_core.tools import tool
from langchain_openai import ChatOpenAI
from langgoap import create_goap_agent
# A small counter so the demo can simulate the cheap writer flaking out
# on its first N invocations. Flip `fail_fast_n_times` to 1 to see the
# planner replan through the premium writer.
def make_writers(fail_fast_n_times: int = 0):
state = {"fast_calls": 0}
@tool
def write_article_fast(brief: str) -> str:
"""Quickly draft an article from a brief. Cheaper, occasionally flaky."""
state["fast_calls"] += 1
if state["fast_calls"] <= fail_fast_n_times:
raise RuntimeError(f"upstream rate limit (attempt {state['fast_calls']})")
return f"Fast draft: {brief}"
@tool
def write_article_premium(brief: str) -> str:
"""Premium-quality article. Higher cost, always reliable."""
return f"Premium draft: {brief}"
return write_article_fast, write_article_premium
@tool
def research_topic(topic: str) -> str:
"""Produce a short research brief for a topic."""
return f"Brief on {topic}"
@tool
def publish_article(draft: str) -> str:
"""Publish an article draft."""
return f"Published: {draft}"
write_article_fast, write_article_premium = make_writers(fail_fast_n_times=0)
agent = create_goap_agent(
tools=[research_topic, write_article_fast, write_article_premium, publish_article],
goal="Publish an article about GOAP for LangGraph",
llm=ChatOpenAI(model="gpt-4o-mini", temperature=0),
# Preconditions/effects keep the planner honest — never LLM-inferred.
preconditions={
"write_article_fast": {"have_brief": True},
"write_article_premium": {"have_brief": True},
"publish_article": {"have_draft": True},
},
effects={
"research_topic": {"have_brief": True},
"write_article_fast": {"have_draft": True},
"write_article_premium": {"have_draft": True},
"publish_article": {"published": True},
},
# A* minimizes total cost. Omitted tools default to cost=1.0.
costs={
"research_topic": 1.0,
"write_article_fast": 1.0,
"write_article_premium": 5.0,
"publish_article": 1.0,
},
# Wire each tool's return value into the next tool's input.
result_keys={
"research_topic": "brief",
"write_article_fast": "draft",
"write_article_premium": "draft",
},
)
result = agent.invoke(
{
"world_state": {"topic": "GOAP for LangGraph"},
"goal": agent.goap_goal,
}
)
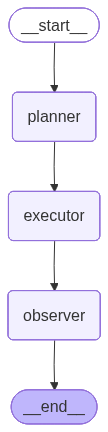
agent is a compiled LangGraph graph. Use it with streaming,
checkpointers, interrupt(), or any LangGraph feature. The LangGraph
cycle that create_goap_agent compiles to is small and fixed — every
plan flows through the same planner → executor → observer loop:
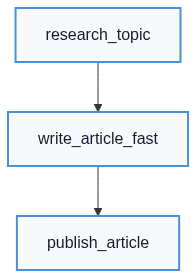
Scenario 1 — Happy path (cheap writer wins on cost)#
A* sees two paths to have_draft: True and picks the cheaper one:
status: 'goal_achieved'
replan_count: 0
blacklisted_actions: []
plan.action_names: ['research_topic', 'write_article_fast', 'publish_article']
plan.total_cost: 3.0
execution_history:
1. [ok ] research_topic
2. [ok ] write_article_fast
3. [ok ] publish_article
world_state (relevant keys): {'topic': 'GOAP for LangGraph', 'brief': 'Brief on GOAP for LangGraph', 'draft': 'Fast draft: Brief on GOAP for LangGraph'}
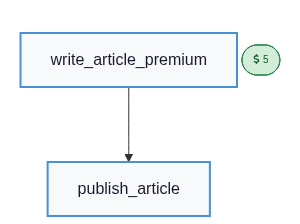
Scenario 2 — Cheap writer flakes, planner replans through premium#
Set fail_fast_n_times=1 and run again. write_article_fast raises on
its first call, the executor blacklists it, and the observer hands
control back to the planner. A* re-derives a new plan from the current
world state (have_brief is already True because research_topic
succeeded), so the remaining work is just the premium writer plus
publish:
status: 'goal_achieved'
replan_count: 1
blacklisted_actions: ['write_article_fast']
plan.action_names: ['write_article_premium', 'publish_article']
plan.total_cost: 6.0
execution_history:
1. [ok ] research_topic
2. [FAIL] write_article_fast (upstream rate limit (attempt 1))
3. [ok ] write_article_premium
4. [ok ] publish_article
world_state (relevant keys): {'topic': 'GOAP for LangGraph', 'brief': 'Brief on GOAP for LangGraph', 'draft': 'Premium draft: Brief on GOAP for LangGraph'}
What’s in the box#
Cost-aware planner — given your tools and a goal, finds the cheapest sequence of tool calls that reaches it. You supply per-action costs, optional effect validators that double-check what each tool actually changed, and per-action retry budgets.
Constraint-aware refinement — when your goal carries hard resource caps (budgets, time windows) or objectives to minimize or maximize, the candidate plan is handed to a constraint solver (OR-Tools CP-SAT) that refines or replaces it to satisfy them.
Plan scoring — rank candidate plans by a single number (
SimpleScore), by feasibility-first hard/soft tradeoffs (HardSoftScore— hard violations make a plan infeasible, soft scores rank the survivors), or by weighted priority levels (BendableScore).Declarative constraints — a fluent
ConstraintBuilderAPI for declaring resource limits and optimization objectives without writing solver code.Temporal scheduling — when actions have durations and deadlines, LangGOAP solves a scheduling problem alongside the plan and can render the result as a Gantt chart.
Natural-language goals — describe the goal in plain English and any
BaseChatModel(OpenAI, Anthropic, local, …) translates it into a symbolic goal exactly once, before any tool runs.Replanning memory — each step’s outcome is recorded in a LangGraph
BaseStorekeyed by tool name, so on replan the planner can avoid actions that already failed in this run. No vector embeddings or extra infrastructure required.Pluggable tracing — a
PlanningTracerProtocol with sync and async hooks streams planning events to LangSmith, OpenTelemetry, or any logger you wire up.Plan visualization — render any plan as a Mermaid diagram, GraphViz DOT graph, ASCII tree, or Gantt chart.
Multi-goal decomposition — a
MultiGoalwrapper sequences a list of subgoals into a single executable plan that satisfies them in order.Progressive API — three entry points for different needs:
create_goap_agent(one-liner from a list of LangChain tools),goapify_tool(decorate an existing tool with planning metadata), andGoapSubgraph(embed planning inside a larger LangGraph).
Install#
pip install langgoap
Requires Python 3.10+.
Documentation layout#
Concepts — GOAP planning, constraint optimization, and the LangGraph-native execution model.
Examples — 27 tutorial notebooks and 12 basics notebooks.
API reference — every symbol in the public
langgoap.__all__.