Robot Navigation — A* Path Planning Primer#
Adapted from unified-planning’s 01-basic-example, where a robot moves between 10 locations connected in a chain.
What this notebook shows#
How to translate a classical planning problem into LangGOAP’s flat boolean state space.
How A* discovers the shortest path through a linear corridor.
How action cost lets A* choose the cheapest route through a weighted graph — even when the cheapest route has more steps than the direct alternative.
LangGOAP vs parametrized planners#
unified-planning uses a lifted representation: one parametric fluent
robot_at(l) plus one parametric action move(l_from, l_to). LangGOAP
works on flat state — each location is its own boolean key, and each
edge is its own ActionSpec. The search space is larger but the
model is simpler, and A* still finds the optimal plan.
from tutorial_examples.robot_navigation import (
linear_corridor_actions,
linear_corridor_start,
weighted_grid_actions,
weighted_grid_start,
)
from langgoap import GoalSpec, GoapGraph, successful_action_names
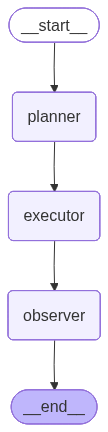
GOAP Execution Graph#
The planner discovers a plan, the executor runs each action, and the observer checks progress — replanning automatically if something fails.
from IPython.display import Image, display
graph = GoapGraph(actions=linear_corridor_actions(n_segments=10))
display(Image(graph.compile().get_graph().draw_mermaid_png()))
1. Linear corridor — the simplest planning problem#
Ten locations l0, l1, …, l10. Each move_l{i}_to_l{i+1} action
has unit cost. The robot starts at l0 and must reach l10.
A* explores the graph forward, finds exactly one path, and returns the sequence of ten moves.
actions = linear_corridor_actions(n_segments=10)
result = GoapGraph(actions=actions).invoke(
goal=GoalSpec(conditions={"at_l10": True}),
world_state=linear_corridor_start(n_segments=10),
)
successful = successful_action_names(result)
print(f"Status: {result['status']}")
print(f"Steps: {len(successful)}")
print(f"First → Last: {successful[0]} ... {successful[-1]}")
2. Weighted grid — cost-driven planning#
Five locations connected by bidirectional edges with different costs:
(4)
A ------------ D
| |
(1)| (1)|
| |
B --(1)-- C --(1)-- E
Two paths from A to E:
A → D → Ecosts4 + 1 = 5A → B → C → Ecosts1 + 1 + 1 = 3
A* prefers the longer path because the total cost is lower. This
is the core optimality guarantee of A* — minimize g(n), not step
count.
result = GoapGraph(actions=weighted_grid_actions()).invoke(
goal=GoalSpec(conditions={"at_E": True}),
world_state=weighted_grid_start("A"),
)
successful = successful_action_names(result)
print(f"Status: {result['status']}")
print(f"Path: {' → '.join(successful)}")
3. Reverse direction#
Edges are bidirectional, so the same cheapest route works in reverse.
result = GoapGraph(actions=weighted_grid_actions()).invoke(
goal=GoalSpec(conditions={"at_A": True}),
world_state=weighted_grid_start("E"),
)
successful = successful_action_names(result)
print(f"Status: {result['status']}")
print(f"Path: {' → '.join(successful)}")
4. Visualizing the plan#
Plan.to_ascii() prints a readable tree that highlights parallel
groups (none here — every step depends on the previous one).
from langgoap.planner.astar import plan as astar_plan
plan_obj = astar_plan(
weighted_grid_start("A"),
GoalSpec(conditions={"at_E": True}),
weighted_grid_actions(),
)
print(plan_obj.to_ascii())
print(f"Total cost: {plan_obj.total_cost}")
Summary#
Classical path-finding problems map cleanly to LangGOAP with one boolean per location and one
ActionSpecper edge.A* finds the cheapest plan, not the shortest — cost-weighted search beats step-count minimization.
The same A* loop solves corridors, grids, and any other static graph you can describe with preconditions and effects.
Every scenario here is verified by
tests/integration/test_robot_navigation.py.