Flexible Job Shop — the complete v0.1.0 pipeline in one notebook#
This is the final Tier 3 tutorial and deliberately exercises every major v0.1.0 subsystem against a single deterministic instance. Nothing in this notebook is approximate — every number is pinned in tests/integration/test_flexible_job_shop.py and regenerated top-to-bottom on every run.
The classic Flexible Job Shop Scheduling Problem (FJSSP) lets each operation run on one of several eligible machines with different processing times. LangGOAP’s CP-SAT scheduler does not model per-machine mutex natively (there is no NoOverlap resource), so the FJSSP “choose a machine” decision is recast here as a “choose a mode” decision on each operation: express runs on an in-house fast machine that is pricey per hour; standard runs on a cloud worker that is cheap but slow. This is the same recasting that project_job_scheduling.ipynb uses for MRCPSP, and it is the idiomatic LangGOAP pattern for flexibility problems.
What you will see working together:
A* finds the greedy-by-cost plan (all
*_expressmodes).CSP validation rejects the greedy plan under a
cost_usd=130hard cap, triggering the pipeline’s enumeration path.CSP enumeration + multi-plan optimization picks the cheapest single-blacklist alternative via CP-SAT Boolean selection variables with a
cost_usd → MINIMIZEobjective.CSP temporal scheduling places three independent jobs on parallel tracks with per-job precedence chains, giving a makespan dominated by the critical-path job (
gamma).Hard / soft / infeasible score decomposition across three goal variants (no cap, impossible cap, soft cap).
Fluent
ConstraintBuilderreproduces the hand-rolled goal structurally — theConstraintProvideranalogue.GoapGraphtracer +StoreExecutionHistorycapture the planning telemetry and persist anExecutionRecordin a LangGraphInMemoryStore.plan.draw_gantt_png()renders the resulting schedule as a Gantt chart PNG fromCSPMetadata.schedule.
1. The flexible job shop domain#
The instance is deliberately small: 3 jobs (alpha, beta, gamma), each with 2 sequential operations (prepare → finalize), each with 2 modes (express, standard). That gives 3 × 2 × 2 = 12 actions total — a tiny catalog the CSP solver dispatches in milliseconds and every number in this notebook can be checked by hand.
Every action aggregates two resources: cost_usd (the CSP constraint and objective) and duration_hours (informational). Every action also carries a datetime.timedelta duration that feeds CP-SAT’s temporal scheduler.
from tutorial_examples.data.flexible_job_shop_instance import (
ALT_PLAN_COST_USD,
ALT_PLAN_DURATION_HOURS,
GREEDY_COST_USD,
GREEDY_DURATION_HOURS,
GREEDY_MAKESPAN_HOURS,
HARD_COST_CAP,
JOBS,
)
from tutorial_examples.flexible_job_shop import (
flexible_job_shop_actions,
flexible_job_shop_goal,
flexible_job_shop_goal_fluent,
flexible_job_shop_start,
)
actions = flexible_job_shop_actions()
start = flexible_job_shop_start()
print(f"jobs : {[j.name for j in JOBS]}")
print(f"total actions : {len(actions)}")
print(f"state flags : {len(start)}")
print()
print(f"{'action':<26}{'dur':<6}{'cost_usd':<10}preconditions")
print("-" * 86)
for a in actions:
dur = f"{int(a.duration.total_seconds() / 3600)}h" if a.duration else "-"
cost_usd = a.resources["cost_usd"]
pre = ", ".join(f"{k}={v}" for k, v in a.preconditions.items()) or "(none)"
print(f"{a.name:<26}{dur:<6}{cost_usd:<10}{pre}")
jobs : ['alpha', 'beta', 'gamma']
total actions : 12
state flags : 6
action dur cost_usd preconditions
--------------------------------------------------------------------------------------
prepare_alpha_express 2h 20.0 prepare_alpha_done=False
prepare_alpha_standard 4h 8.0 prepare_alpha_done=False
finalize_alpha_express 1h 10.0 finalize_alpha_done=False, prepare_alpha_done=True
finalize_alpha_standard 2h 4.0 finalize_alpha_done=False, prepare_alpha_done=True
prepare_beta_express 3h 30.0 prepare_beta_done=False
prepare_beta_standard 5h 12.0 prepare_beta_done=False
finalize_beta_express 2h 20.0 finalize_beta_done=False, prepare_beta_done=True
finalize_beta_standard 3h 8.0 finalize_beta_done=False, prepare_beta_done=True
prepare_gamma_express 4h 40.0 prepare_gamma_done=False
prepare_gamma_standard 6h 15.0 prepare_gamma_done=False
finalize_gamma_express 3h 30.0 finalize_gamma_done=False, prepare_gamma_done=True
finalize_gamma_standard 4h 10.0 finalize_gamma_done=False, prepare_gamma_done=True
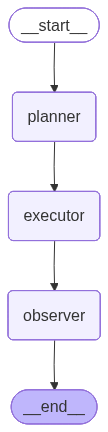
GOAP Execution Graph#
The planner discovers a plan, the executor runs each action, and the observer checks progress — replanning automatically if something fails.
from IPython.display import Image, display
from langgoap import GoapGraph
graph = GoapGraph(actions=actions)
display(Image(graph.compile().get_graph().draw_mermaid_png()))
Two design choices make this a clean showcase:
prepare_*actions have no prior-op guards — the three jobs are mutually independent, so the scheduler is free to run them in parallel.finalize_*_*requires the matchingprepare_*_done— this encodes the per-job precedence chain as a plain precondition. The scheduler picks this up automatically via effect→precondition matching inplanner/csp.py::build_dependency_graph.
2. Greedy plan via the A* → CSP pipeline#
The A* heuristic minimizes the sum of Mode.cost (wall-clock hours), so the greedy plan picks every *_express mode. With no cost cap on the goal, CSP still runs because the goal carries a cost_usd → MINIMIZE objective — that is what routes the plan through the scheduler and populates plan.metadata.csp.
from langgoap import pipeline_plan
greedy = pipeline_plan(
start,
flexible_job_shop_goal(),
actions,
)
assert greedy is not None
print(f"action_names : {greedy.action_names}")
print(f"total_cost : {greedy.total_cost}")
print(f"score : {greedy.score}")
display(Image(greedy.draw_mermaid_png()))
Six actions, one per operation per job, all in *_express mode. The A* total cost is 15.0 (2+1+3+2+4+3), and the HardSoftScore is hard=0.0, soft=-150.0 — the plan is feasible and the soft component reflects the MINIMIZE objective summing to cost_usd = 150.
3. Schedule — three jobs in parallel, gamma on the critical path#
CP-SAT’s temporal scheduler turns every ActionSpec.duration into an IntervalVar and seeds precedence edges from the dependency graph. Because the three jobs share no preconditions, all three prepare_*_express actions start at t=0 and run in parallel. Each job’s finalize_* waits only for its own prepare, so the makespan is the maximum per-job duration:
Job |
Prepare (express) |
Finalize (express) |
Per-job duration |
|---|---|---|---|
alpha |
2h |
1h |
3h |
beta |
3h |
2h |
5h |
gamma |
4h |
3h |
7h ← critical path |
Serial execution would take 15h; parallelism collapses the wall-clock time to 7h.
from datetime import timedelta
csp = greedy.metadata.csp
assert csp is not None
print(f"status : {csp.status.value}")
print(f"makespan : {csp.makespan}")
print()
print(f"{'action':<26}{'start':>10}{'end':>10}")
print("-" * 46)
for entry in sorted(csp.schedule, key=lambda s: (s.start, s.action_name)):
print(f"{entry.action_name:<26}{str(entry.start):>10}{str(entry.end):>10}")
assert csp.makespan == timedelta(hours=GREEDY_MAKESPAN_HOURS)
status : feasible
makespan : 7:00:00
action start end
----------------------------------------------
prepare_alpha_express 0:00:00 2:00:00
prepare_beta_express 0:00:00 3:00:00
prepare_gamma_express 0:00:00 4:00:00
finalize_gamma_express 4:00:00 7:00:00
finalize_beta_express 5:00:00 7:00:00
finalize_alpha_express 6:00:00 7:00:00
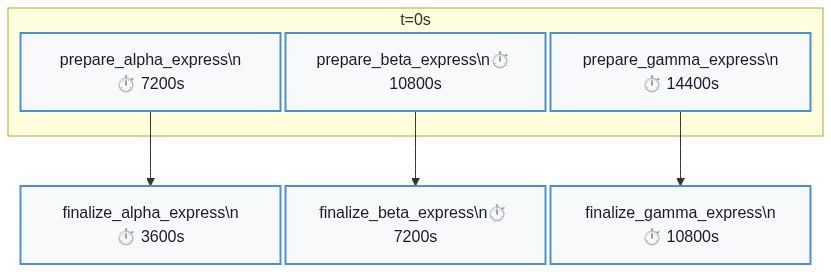
Gantt chart#
plan.draw_gantt_png() renders the schedule from CSPMetadata.schedule as a PNG image. The three overlapping prepare_*_express bars at the top and the shifted finalize_*_express tails tell the whole parallelism story in one picture.
display(Image(greedy.draw_gantt_png()))
4. CSP enumeration under a hard cost_usd cap#
Now attach a hard cost cap. The greedy plan aggregates cost_usd = 150, so a cost_usd <= 130 hard constraint rejects it. validate_plan() marks the primary plan INFEASIBLE; the pipeline then calls enumerate_alternatives() which blacklists each action in the rejected plan one at a time and re-runs A* for each. Every surviving alternative feeds optimize_plans(), which builds a single CP-SAT model with Boolean selection variables, applies the hard constraint, and minimizes the weighted objective.
The only single-blacklist alternative that:
satisfies
cost_usd <= 130(eliminates every express swap exceptgamma), andminimizes the
cost_usd → MINIMIZEobjective (beats every other feasible alternative),
is: blacklist prepare_gamma_express → use prepare_gamma_standard. That swap cuts cost_usd from 150 → 125 at the cost of one extra wall-clock hour on the gamma prepare (2 extra hours in duration, 40 → 15 USD).
capped_goal = flexible_job_shop_goal(
max_cost_usd=HARD_COST_CAP, max_cost_level="hard"
)
capped = pipeline_plan(
start, capped_goal, actions
)
assert capped is not None
capped_csp = capped.metadata.csp
assert capped_csp is not None
print(f"action_names : {capped.action_names}")
print(f"status : {capped_csp.status.value}")
print(f"total_cost : {capped.total_cost}")
print(f"score : {capped.score}")
print()
print("resource_usage:")
for usage in capped_csp.resource_usage:
print(
f" {usage.key:<16} total={usage.total:<7}"
f" level={usage.level:<4} satisfied={usage.satisfied}"
)
assert "prepare_gamma_standard" in capped.action_names
assert "prepare_gamma_express" not in capped.action_names
A few things to notice:
status = optimal— multi-plan CP-SAT returnsOPTIMALwhen it has proved it found the minimum (it has), not just a feasible selection.makespan = None—optimize_plans()only picks the best plan; it does not also build anIntervalVarschedule. That is the job ofvalidate_plan()on the primary plan path. For enumeration results, the schedule is left unset.cost_usd.level = 'hard'— the usage entry is stamped with the level of its matchingConstraintSpec. Since we declaredcost_usdhard, it readshard(notinfo).duration_hours.level = 'info'— no constraint was declared onduration_hours, so it staysinfo. A visualizer can render the two differently.soft = -125— the MINIMIZE objective now sums to125instead of150, and since MINIMIZE flips sign, the soft score reads-125. The plan strictly beats the greedy plan’ssoft = -150.
5. Score decomposition — infeasible and soft variants#
The Score hierarchy uses a lexicographic hard/soft sign convention: hard <= 0 (zero means feasible), and soft has no sign restriction (MINIMIZE contributions flip sign). This makes three cases easy to inspect at once:
Variant |
Cap |
Hard |
Soft |
Feasible? |
|---|---|---|---|---|
no cap |
(none) |
|
|
✓ |
hard |
|
|
|
✓ |
hard |
|
|
|
✗ |
soft |
|
|
|
✓ |
The infeasible variant demonstrates what happens when no single-blacklist alternative rescues the plan: every alternative still violates the cap, so the pipeline returns the primary plan marked INFEASIBLE with a hard score equal to the violation amount. The soft variant demonstrates that a soft violation penalizes soft but leaves hard == 0 and the plan still feasible — this is the hard/soft split introduced in Epic 3.
from langgoap import CSPStatus
from langgoap.score import HardSoftScore
# Infeasible hard cap — no alternative can satisfy it.
impossible = pipeline_plan(
start,
flexible_job_shop_goal(max_cost_usd=50.0, max_cost_level="hard"),
actions,
)
assert impossible is not None and impossible.metadata.csp is not None
assert impossible.metadata.csp.status == CSPStatus.INFEASIBLE
assert isinstance(impossible.score, HardSoftScore)
print(f"[infeasible hard cap=$50]")
print(f" status = {impossible.metadata.csp.status.value}")
print(f" score = {impossible.score}")
print(f" feasible = {impossible.score.is_feasible()}")
print()
# Soft cap — violation penalizes soft but plan stays feasible.
soft = pipeline_plan(
start,
flexible_job_shop_goal(max_cost_usd=100.0, max_cost_level="soft"),
actions,
)
assert soft is not None and soft.metadata.csp is not None
assert isinstance(soft.score, HardSoftScore)
print(f"[soft cap=$100]")
print(f" status = {soft.metadata.csp.status.value}")
print(f" score = {soft.score}")
print(f" feasible = {soft.score.is_feasible()}")
soft_cost = next(u for u in soft.metadata.csp.resource_usage if u.key == "cost_usd")
print(f" cost_usd = total={soft_cost.total} level={soft_cost.level} satisfied={soft_cost.satisfied}")
For the soft case the arithmetic is soft = -objective(150) - overflow(150 - 100 = 50) = -200. cost_usd.satisfied reads False but the plan itself stays is_feasible() == True because no hard constraint was violated.
6. Fluent ConstraintBuilder parity#
The tutorial module ships two goal factories for the capped case: flexible_job_shop_goal(max_cost_usd=...) builds the GoalSpec by hand, and flexible_job_shop_goal_fluent(...) builds it via the ConstraintBuilder fluent API. Both produce structurally identical GoalSpec instances and — when run through the same pipeline — identical plans and scores. The builder is a fluent constraint-provider analogue: a typed construction helper, not a new field on GoalSpec.
hand_goal = flexible_job_shop_goal(
max_cost_usd=HARD_COST_CAP, max_cost_level="hard"
)
fluent_goal = flexible_job_shop_goal_fluent(
max_cost_usd=HARD_COST_CAP, max_cost_level="hard"
)
assert dict(hand_goal.conditions) == dict(fluent_goal.conditions)
assert hand_goal.constraints == fluent_goal.constraints
assert dict(hand_goal.objectives or {}) == dict(fluent_goal.objectives or {})
print("hand-rolled and fluent goals are structurally identical")
print()
print("fluent chain:")
print(" ConstraintBuilder.for_plan()")
print(' .sum_resource("cost_usd")')
print(f" .bounded(max={HARD_COST_CAP})")
print(' .penalize(level="hard", weight=1.0)')
print(' .as_constraint("cost_usd")')
print()
print(" ConstraintBuilder.for_plan()")
print(' .sum_resource("cost_usd")')
print(" .minimize()")
print(' .as_objective("cost_usd")')
fluent_plan = pipeline_plan(start, fluent_goal, actions)
assert fluent_plan is not None
assert set(fluent_plan.action_names) == set(capped.action_names)
assert fluent_plan.score == capped.score
7. Natural-language goal intake#
GoalInterpreter turns a plain-English request into a GoalSpec by asking an LLM for a structured InterpretedGoal — the conditions, constraints, objectives, and a reasoning trace. Because the prompt is provider-agnostic (any BaseChatModel), this notebook uses FakeStructuredModel to pin the response and keep the run reproducible in CI; swap in ChatOpenAI, ChatAnthropic, or any other chat model to drive it from a real LLM.
The NL request below carries the same intent as the hand-rolled capped goal — finish every job, cap at $130, minimize cost — so the interpreted goal should be structurally identical, and GoapGraph.invoke_nl() should run the exact same alternative plan we picked manually in §4.
from langgoap import (
GoalInterpreter,
GoapGraph,
InterpretedConstraint,
InterpretedGoal,
InterpretedObjective,
)
from langgoap.testing import FakeStructuredModel
fake_goal = InterpretedGoal(
conditions={
"finalize_alpha_done": True,
"finalize_beta_done": True,
"finalize_gamma_done": True,
},
constraints=[
InterpretedConstraint(
key="cost_usd",
max=HARD_COST_CAP,
min=None,
weight=1.0,
level="hard",
),
],
objectives=[
InterpretedObjective(metric="cost_usd", direction="minimize"),
],
reasoning="The user wants every job finished at the lowest cost under a $130 cap.",
)
nl_llm = FakeStructuredModel(response=fake_goal)
# Structural parity: the interpreted GoalSpec matches the hand-rolled capped goal.
interpreter = GoalInterpreter(llm=nl_llm, actions=actions)
nl_goal = interpreter.interpret(
"Finish every job with cost_usd at or under $130 and minimize total cost."
)
assert dict(nl_goal.conditions) == dict(hand_goal.conditions)
assert nl_goal.constraints == hand_goal.constraints
assert dict(nl_goal.objectives or {}) == dict(hand_goal.objectives or {})
print("interpreted goal matches the hand-rolled capped goal")
print()
# One-liner: invoke_nl interprets + plans + executes in a single call.
nl_graph = GoapGraph(actions=actions)
nl_result = nl_graph.invoke_nl(
"Finish every job with cost_usd at or under $130 and minimize total cost.",
llm=nl_llm,
world_state=flexible_job_shop_start(),
)
assert nl_result["status"] == "goal_achieved"
nl_executed = [r.action_name for r in nl_result["execution_history"]]
assert "prepare_gamma_standard" in nl_executed
assert "prepare_gamma_express" not in nl_executed
print(f"status : {nl_result['status']}")
print(f"executed : {nl_executed}")
interpreted goal matches the hand-rolled capped goal
status : goal_achieved
executed : ['prepare_alpha_express', 'finalize_alpha_express', 'prepare_beta_express', 'finalize_beta_express', 'prepare_gamma_standard', 'finalize_gamma_express']
8. End-to-end execution via GoapGraph with tracer and history#
pipeline_plan stops once a plan exists. GoapGraph.invoke() takes the plan the rest of the way: the planner node emits the plan, the executor node runs every ActionSpec.execute against the world state, and the observer node checks goal conditions after each step.
Attaching a LoggingTracer and a StoreExecutionHistory captures both domain events (plan start, plan complete, goal achieved) and a persistent ExecutionRecord for replay or cost-learning analysis. The history is backed by a LangGraph InMemoryStore — swap it for AsyncPostgresStore or RedisStore in production without any API changes.
StoreExecutionHistory uses a reverse-index design (no search() calls): the write is put() into an executions namespace plus a small bounded list under goal_index/<goal_hash>. The read is a get() against the goal-hash index followed by one get() per ID. That makes it work on every BaseStore implementation without requiring an embedder.
from langgraph.store.memory import InMemoryStore
from langgoap import GoapGraph
from langgoap.history import StoreExecutionHistory
from langgoap.tracing import LoggingTracer
store = InMemoryStore()
history = StoreExecutionHistory(store)
tracer = LoggingTracer()
graph = GoapGraph(actions=actions, tracer=tracer, history=history)
greedy_goal = flexible_job_shop_goal()
result = graph.invoke(goal=greedy_goal, world_state=flexible_job_shop_start())
assert result["status"] == "goal_achieved"
executed = [r.action_name for r in result["execution_history"]]
print(f"status : {result['status']}")
print(f"executed : {executed}")
print()
records = history.query_by_goal(history.goal_hash_for(greedy_goal))
assert len(records) == 1
record = records[0]
print(f"recorded execution:")
print(f" outcome = {record.outcome}")
print(f" replan_count = {record.replan_count}")
print(f" expected_cost = {record.expected_cost}")
print(f" actual_cost = {record.actual_cost}")
print(f" plan_actions = {list(record.plan_actions)}")
status : goal_achieved
executed : ['prepare_alpha_express', 'finalize_alpha_express', 'prepare_beta_express', 'finalize_beta_express', 'prepare_gamma_express', 'finalize_gamma_express']
recorded execution:
outcome = success
replan_count = 0
expected_cost = 15.0
actual_cost = 15.0
plan_actions = ['prepare_alpha_express', 'finalize_alpha_express', 'prepare_beta_express', 'finalize_beta_express', 'prepare_gamma_express', 'finalize_gamma_express']
Summary#
This notebook brings the whole v0.1.0 story together on one instance:
A* produced the greedy plan (
cost_usd = 150).CSP validation rejected it under a
$130hard cap.CSP enumeration + multi-plan optimization picked
prepare_gamma_standardand the new aggregatecost_usd = 125— the cheapest single-blacklist alternative.CSP temporal scheduling placed the three jobs in parallel with a gamma-dominated
7hmakespan.Hard / soft / infeasible scoring reported feasibility and violation amounts across three goal variants.
Fluent
ConstraintBuilderproduced a structurally identical goal to the hand-rolled factory.GoapGraphran the plan to completion, recorded domain events viaLoggingTracer, and persisted anExecutionRecordviaStoreExecutionHistorybacked byInMemoryStore.plan.draw_gantt_png()rendered the parallel-then-merge schedule as a Gantt chart PNG fromCSPMetadata.schedule.
The integration test in tests/integration/test_flexible_job_shop.py pins every number in this notebook — change the instance and the test fails in a single, obvious place.
This is the final notebook in the v0.1.0 tutorial catalog.