Project Job Scheduling — the MRCPSP in LangGOAP#
A Tier 2 tutorial that translates the Multi-mode Resource-Constrained Project Scheduling Problem (MRCPSP) into a LangGOAP planning problem. The original instance ports the PSPLIB multi-mode RCPSP benchmark suite. We use a compact five-job subset (design -> {frontend || backend} -> integrate -> deploy) with two modes per real job so the solver runs instantly while still exercising the key features:
Precedence scheduling — the dependency DAG is extracted from action effect->precondition matching, the same way
planner/csp.py::build_dependency_graphcomputes it for every other tutorial.Mode selection — each real job has a fast-expensive and a slow-cheap mode. A* picks whichever mode combination minimizes total duration (the primary objective).
Non-renewable resource budget — aggregated
budgetacross the plan turns into aConstraintSpec(key="budget", level="hard"), flipping the pipeline into alternative-plan enumeration when the cheapest-by-duration plan exceeds it.Makespan minimization — per-job
timedeltadurations feed CP-SAT’sIntervalVar, so makespan falls out as the longest path through the precedence DAG and independent jobs run in parallel.
What this tutorial does not cover (documented upstream in
examples/tutorials/tutorial_examples/data/project_job_scheduling_instance.py):
per-period renewable resource capacities, multi-project horizons,
and tardiness costs. LangGOAP aggregates resource totals across the
whole plan but does not yet model per-time-slice capacity — exactly
the same limitation the vehicle routing tutorial calls out.
import logging
# The infeasibility demo further down deliberately triggers the
# CSP's "all alternatives infeasible" advisory — silence the warning.
logging.getLogger("langgoap").setLevel(logging.ERROR)
from langgoap import CSPStatus, GoapGraph
from langgoap.planner.pipeline import plan as pipeline_plan
from tutorial_examples.data.project_job_scheduling_instance import (
DEFAULT_BUDGET,
JOBS,
)
from tutorial_examples.project_job_scheduling import (
project_job_scheduling_actions,
project_job_scheduling_goal,
project_job_scheduling_start,
)
print(f"Jobs: {len(JOBS)} (default budget cap = {DEFAULT_BUDGET})")
for j in JOBS:
preds = ', '.join(j.predecessors) if j.predecessors else '—'
modes = ', '.join(f'{m.name}({m.duration_hours}h, ${m.budget})' for m in j.modes)
print(f' {j.name:<10s} preds={preds:<18s} modes=[{modes}]')
1. Action catalog — one action per (job, mode) pair#
project_job_scheduling_actions() expands every job into one
ActionSpec per mode. The resulting catalog has:
design_singleanddeploy_single— trivial source and sink jobs with a single mode each (kept as actions so the precedence chain is visible in the rendered plan).frontend_fast/slow,backend_fast/slow,integrate_fast/slow— the two-mode real jobs.
The action cost is duration_hours so that A* naturally minimizes
total work. resources={"duration_hours": ..., "budget": ...}
lets the CSP phase aggregate both quantities, and
duration=timedelta(hours=duration_hours) feeds CP-SAT’s temporal
scheduler so the makespan respects real parallelism.
actions = project_job_scheduling_actions()
print(f'Total actions: {len(actions)}\n')
for a in actions:
dur = a.resources.get('duration_hours', 0.0)
bud = a.resources.get('budget', 0.0)
print(f' {a.name:<22s} cost={a.cost:<3.0f} duration={dur:<3.0f}h budget=${bud:<4.0f}')
Total actions: 8
do_design_single cost=1 duration=1 h budget=$0
do_frontend_fast cost=3 duration=3 h budget=$10
do_frontend_slow cost=6 duration=6 h budget=$4
do_backend_fast cost=4 duration=4 h budget=$12
do_backend_slow cost=8 duration=8 h budget=$6
do_integrate_fast cost=2 duration=2 h budget=$8
do_integrate_slow cost=5 duration=5 h budget=$3
do_deploy_single cost=1 duration=1 h budget=$2
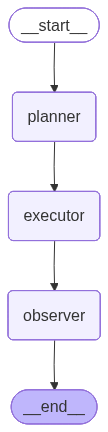
GOAP Execution Graph#
The planner discovers a plan, the executor runs each action, and the observer checks progress — replanning automatically if something fails.
from IPython.display import Image, display
graph = GoapGraph(actions=actions)
display(Image(graph.compile().get_graph().draw_mermaid_png()))
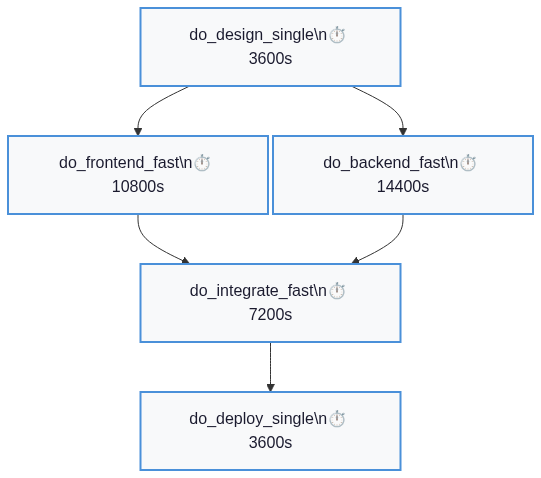
2. Solve the fastest schedule#
The default goal asks for every job done and attaches a
duration_hours → MINIMIZE objective. Because the goal has an
objective, the planner routes through the CSP phase and returns a
HardSoftScore together with a full per-action schedule.
A* picks the all-fast mode combination (duration sum = 11h).
CP-SAT’s IntervalVar scheduler then recognizes that frontend and
backend have no precedence edge between them and schedules them in
parallel after design, so the makespan drops to 8h.
plan_obj = pipeline_plan(
project_job_scheduling_start(),
project_job_scheduling_goal(),
actions,
)
print(f'CSP status: {plan_obj.metadata.csp.status.value}')
print(f'Duration (A*): {plan_obj.total_cost} hours (sum of work)')
print(f'Makespan (CP-SAT): {plan_obj.metadata.csp.makespan} (wall clock)')
print()
print('Selected modes:')
for step in plan_obj.actions:
print(f' {step.name}')
print()
print('Schedule (parallel where precedence allows):')
for entry in plan_obj.metadata.csp.schedule:
print(f' {entry.action_name:<22s} {entry.start} → {entry.end}')
display(Image(plan_obj.draw_mermaid_png()))
3. HardSoftScore decomposition#
The pipeline translates the duration_hours → MINIMIZE objective
into the soft component of the score (more negative = worse).
Resource usage is reported as level="info" because neither
duration_hours nor budget has a ConstraintSpec attached yet —
they’re aggregated for reporting but not enforced.
print(f'plan.score = {plan_obj.score}')
print(f'score.is_feasible = {plan_obj.score.is_feasible()}')
print(f'score.value = {plan_obj.score.value} (scalar for logging)')
print()
print('Resource usage (info-level — no constraints yet):')
for u in plan_obj.metadata.csp.resource_usage:
print(f' {u.key:<16s} total={u.total:<6.1f} level={u.level}')
plan.score = HardSoftScore(hard=0, soft=-11)
score.is_feasible = True
score.value = -11.0 (scalar for logging)
Resource usage (info-level — no constraints yet):
duration_hours total=11.0 level=info
budget total=32.0 level=info
4. Hard budget → alternative-plan enumeration#
The all-fast plan burns $32 of non-renewable budget. Adding a
hard cap of $26 makes that plan infeasible, so the pipeline
enumerates alternatives — in this case by blacklisting the most
expensive individual action and replanning. The resulting plan
swaps frontend_fast (10) for frontend_slow (4), cuts budget to
exactly $26, and lengthens duration to 14h.
hard_plan = pipeline_plan(
project_job_scheduling_start(),
project_job_scheduling_goal(max_budget=26, max_budget_level='hard'),
actions,
)
print(f'CSP status: {hard_plan.metadata.csp.status.value}')
print(f'Score: {hard_plan.score}')
print(f'Duration (A*): {hard_plan.total_cost} hours')
print()
print('Selected modes:')
for step in hard_plan.actions:
print(f' {step.name}')
print()
print('Resource usage (budget is now a hard constraint):')
for u in hard_plan.metadata.csp.resource_usage:
print(f' {u.key:<16s} total={u.total:<6.1f} level={u.level} satisfied={u.satisfied}')
5. Soft budget → penalty, not rejection#
A soft cap of $20 is intentionally unreachable (even the
cheapest-by-budget all-slow plan needs $15, but A* minimizes
duration and picks all-fast at $32). With level="soft" the
pipeline keeps the primary plan and subtracts the $12 overflow
from the soft score instead of marking it infeasible.
soft_plan = pipeline_plan(
project_job_scheduling_start(),
project_job_scheduling_goal(max_budget=20, max_budget_level='soft'),
actions,
)
print(f'CSP status: {soft_plan.metadata.csp.status.value}')
print(f'Score: {soft_plan.score}')
print()
budget_usage = next(u for u in soft_plan.metadata.csp.resource_usage if u.key == 'budget')
print(f'budget.total = {budget_usage.total} (cap was 20)')
print(f'budget.level = {budget_usage.level}')
print(f'budget.satisfied = {budget_usage.satisfied}')
print()
print('Soft score breakdown:')
print(' -duration_hours objective : -11')
print(' -budget overflow penalty : -12')
print(' total :', soft_plan.score.soft)
6. Infeasible hard cap → CSPStatus.INFEASIBLE#
A budget of $10 is below every alternative the pipeline can
reach — even the single-blacklist alternatives cannot find a
feasible combination. The plan comes back with
CSPStatus.INFEASIBLE and a negative hard score tracking the
shortfall.
infeasible_plan = pipeline_plan(
project_job_scheduling_start(),
project_job_scheduling_goal(max_budget=10, max_budget_level='hard'),
actions,
)
print(f'CSP status: {infeasible_plan.metadata.csp.status.value}')
print(f'Score: {infeasible_plan.score}')
print(f'Feasible? {infeasible_plan.score.is_feasible()}')
7. End-to-end execution via GoapGraph.invoke()#
The full LangGraph loop plans, executes, and verifies the world
state. Each action flips its <job>_done flag, the observer
detects that every goal condition is satisfied, and the graph
halts with status="goal_achieved".
result = GoapGraph(actions=actions).invoke(
goal=project_job_scheduling_goal(),
world_state=project_job_scheduling_start(),
)
print(f'status: {result["status"]}')
print()
print('Final world state:')
for j in JOBS:
key = f'{j.name}_done'
print(f' {key:<18s} {result["world_state"][key]}')
status: goal_achieved
Final world state:
design_done True
frontend_done True
backend_done True
integrate_done True
deploy_done True
Summary#
Precedence for free. Effect→precondition chains become the dependency DAG CP-SAT uses to parallelize independent jobs.
Mode selection is A’s job.* Each job’s multiple modes are separate actions; cost-minimization picks the fastest feasible combination.
Non-renewable budgets are aggregated resources. One
ConstraintSpec(key="budget")is enough to flip the pipeline into alternative-plan enumeration when the cheapest-by-time plan exceeds it.Makespan comes from CP-SAT.
IntervalVar+ precedence yields the true parallel makespan (8h) instead of the serial sum of durations (11h).Soft vs hard is a one-line switch. Replace
level="hard"withlevel="soft"to record overflow as a penalty instead of marking the plan infeasible.
Next tutorials build on the same CP-SAT scheduler for task assignment with weighted delay minimization and flexible job-shop scheduling.