Hungry Agent — Natural-Language Goals Meet Cost-Driven Planning#
A Tier 1 primer that combines two of LangGOAP’s headline features in a tiny, readable domain:
GoalInterpreter— turns a natural-language request like"I'm tired and hungry, figure it out"into a structuredGoalSpec.Cost-weighted A* — picks the cheapest combination of actions that satisfies the interpreted goal, adapting to whatever happens to be in the world state.
Domain#
The agent is hungry and tired. Four actions are available:
Action |
Preconditions |
Cost |
|---|---|---|
|
|
1.0 |
|
|
3.0 |
|
(none) |
5.0 |
|
(none) |
1.0 |
The same English request ("I'm tired and hungry...") produces
different plans depending on what the agent has on hand. The planner
reads the world state, not the intent.
Mocking the LLM#
This notebook uses FakeStructuredModel — the same test helper used
by LangGOAP’s own integration suite — so it runs offline without API
keys. In production you would swap in ChatOpenAI, ChatAnthropic,
or any other BaseChatModel. The rest of the code is identical.
from tutorial_examples.hungry_agent import (
hungry_agent_actions,
hungry_agent_start,
)
from langgoap import GoalInterpreter, GoapGraph, InterpretedGoal, successful_action_names
from langgoap.testing import FakeStructuredModel
# In production: from langchain_openai import ChatOpenAI; llm = ChatOpenAI(model="gpt-4o")
llm = FakeStructuredModel(
response=InterpretedGoal(
conditions={"hungry": False, "tired": False},
reasoning="User is tired and hungry; needs to eat and rest.",
),
)
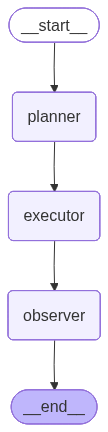
GOAP Execution Graph#
The planner discovers a plan, the executor runs each action, and the observer checks progress — replanning automatically if something fails.
from IPython.display import Image, display
graph = GoapGraph(actions=hungry_agent_actions())
display(Image(graph.compile().get_graph().draw_mermaid_png()))
1. Snack on hand — cheapest path wins#
With a snack available, eat_snack (cost 1) dominates the other
food actions. The planner pairs it with sleep (cost 1) for a
total plan cost of 2.0.
Note that we never mention hungry or tired as boolean keys in the
call — GoalInterpreter extracts them from the English request.
actions = hungry_agent_actions()
state = hungry_agent_start(has_snack=True, has_ingredients=True)
graph = GoapGraph(actions=actions)
result = graph.invoke_nl(
"I'm tired and hungry, figure it out",
llm=llm,
world_state=state,
)
successful = successful_action_names(result)
print(f"Status: {result['status']}")
print(f"Plan: {' + '.join(sorted(successful))}")
print(f"Final: hungry={result['world_state']['hungry']}, tired={result['world_state']['tired']}")
2. No snack, but ingredients are available#
Remove the snack and A* falls back to the next-cheapest eating
action: cook_meal (cost 3). Total plan cost rises to 4.0,
but the English request hasn’t changed at all.
state = hungry_agent_start(has_snack=False, has_ingredients=True)
result = graph.invoke_nl(
"I'm tired and hungry, figure it out",
llm=llm,
world_state=state,
)
successful = successful_action_names(result)
print(f"Plan: {' + '.join(sorted(successful))}")
3. Empty kitchen — delivery is the only option#
With neither a snack nor ingredients, A* has to reach for the most
expensive action: order_delivery (cost 5). Total plan cost 6.0.
This is the core value proposition of goal-oriented planning — one request, three different plans, zero code changes.
state = hungry_agent_start(has_snack=False, has_ingredients=False)
result = graph.invoke_nl(
"I'm tired and hungry, figure it out",
llm=llm,
world_state=state,
)
successful = successful_action_names(result)
print(f"Plan: {' + '.join(sorted(successful))}")
4. Inspecting the interpreted goal#
GoalInterpreter.interpret_raw() returns the full InterpretedGoal
— the structured object the LLM emitted, including the reasoning
trace. This is invaluable for debugging prompt behavior in
production.
interpreter = GoalInterpreter(llm=llm, actions=actions)
raw = interpreter.interpret_raw("I'm tired and hungry, figure it out")
print(f"Conditions: {dict(raw.conditions)}")
print(f"Reasoning: {raw.reasoning}")
Conditions: {'hungry': False, 'tired': False}
Reasoning: User is tired and hungry; needs to eat and rest.
5. Visualizing the winning plan#
Plan.to_ascii() renders the plan as a tree showing step order and
dependencies. eat_snack and sleep have no data dependency on
each other, so they appear as independent roots — either one could
run first (or in parallel, if the executor supports it).
from langgoap import GoalSpec
from langgoap.planner.astar import plan as astar_plan
from langgoap.state import PlanningState
plan_obj = astar_plan(
PlanningState.from_dict(hungry_agent_start(has_snack=True, has_ingredients=True)),
GoalSpec(conditions={"hungry": False, "tired": False}),
actions,
)
print(plan_obj.to_ascii())
print(f"Total cost: {plan_obj.total_cost}")
Plan (2 steps, cost=2)
├── [0] eat_snack
├── [1] sleep
Total cost: 2.0
Summary#
One NL request, three plans.
GoalInterpreterturns English into aGoalSpec; A* picks the cheapest actions for the current world state.The LLM is provider-agnostic. Any
BaseChatModelworks —FakeStructuredModelhere,ChatOpenAI/ChatAnthropicin production.The planner adapts, not the prompt. Same request produces
eat_snack + sleep(cost 2),cook_meal + sleep(cost 4), ororder_delivery + sleep(cost 6) depending on the starting state.
Every scenario here is verified by
tests/integration/test_hungry_agent.py.