Hierarchical Product Launch — MultiGoal sequential decomposition#
A Tier 3 tutorial that stages a SaaS product launch as three dependent sub-goals and lets LangGOAP chain them in a single graph.invoke call. The spotlight is the MultiGoal abstraction in sequential mode: you declare the stages once, the observer runs them in order, and per-stage world state hands off automatically.
The tutorial illustrates four things at once:
MultiGoalsequential decomposition — three sub-goals in one invocation, executed in declaration order.Per-stage A planning isolation* — each sub-goal plans alone; the planner literally never sees actions from later stages while working on an earlier one.
State hand-off — effects from stage 1 become preconditions for stage 2; effects from stage 2 gate stage 3.
Per-sub-goal accounting reset —
replan_count,blacklisted_actions, andaction_failure_countsreset at every sub-goal advance, so a transient failure while writing the PRD does not starve the build stage.
The corresponding integration test is tests/integration/test_hierarchical_product_launch.py. Every assertion in this notebook is mirrored there and runs on every CI build.
1. The launch domain#
tutorial_examples.hierarchical_product_launch exposes three factories:
product_launch_actions(llm)— the sixActionSpecs spanning all three stages.product_launch_start()— a clean-slate world state with every launch milestone set toFalse.product_launch_goal()— the three-sub-goalMultiGoalthe observer chains.
The action catalog is intentionally small so the plan shape is easy to eyeball:
from typing import Any
from langchain_openai import ChatOpenAI
from langgoap import GoapGraph
from tutorial_examples.hierarchical_product_launch import (
product_launch_actions,
product_launch_goal,
product_launch_start,
)
llm = ChatOpenAI(model="gpt-4o-mini", temperature=0)
actions = product_launch_actions(llm)
for a in actions:
pre = dict(a.preconditions) or "(none)"
eff = dict(a.effects)
print(f"{a.name:<20s} pre={pre} eff={eff} cost={a.cost}")
/Users/brian.sam-bodden/Code/langgoap/.venv/lib/python3.12/site-packages/langgraph/checkpoint/serde/encrypted.py:5: LangChainPendingDeprecationWarning: The default value of `allowed_objects` will change in a future version. Pass an explicit value (e.g., allowed_objects='messages' or allowed_objects='core') to suppress this warning.
from langgraph.checkpoint.serde.jsonplus import JsonPlusSerializer
research_market pre=(none) eff={'market_data': True} cost=2.0
write_prd pre={'market_data': True} eff={'prd_approved': True} cost=3.0
implement_features pre={'prd_approved': True} eff={'code_written': True} cost=5.0
qa_test pre={'code_written': True} eff={'qa_passed': True} cost=2.0
prepare_marketing pre={'qa_passed': True} eff={'marketing_ready': True} cost=2.0
announce_launch pre={'marketing_ready': True, 'qa_passed': True} eff={'launched': True} cost=1.0
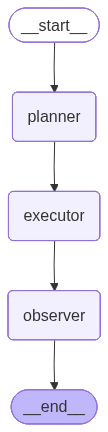
GOAP Execution Graph#
The planner discovers a plan, the executor runs each action, and the observer checks progress — replanning automatically if something fails.
from IPython.display import Image, display
graph = GoapGraph(actions=actions)
display(Image(graph.compile().get_graph().draw_mermaid_png()))
2. The three-stage MultiGoal#
Each sub-goal is an ordinary GoalSpec with a single boolean condition. The MultiGoal wraps them in declaration order and sets mode="sequential" so the observer executes them one after another.
goal = product_launch_goal()
print(f"mode : {goal.mode}")
print(f"sub-goals : {len(goal.goals)}")
for i, sub in enumerate(goal.goals):
print(f" stage {i + 1} : {dict(sub.conditions)}")
mode : sequential
sub-goals : 3
stage 1 : {'prd_approved': True}
stage 2 : {'qa_passed': True}
stage 3 : {'launched': True}
3. Running the whole launch#
A single graph.invoke call drives all three stages. The observer routes between planner and executor as usual, then — when a sub-goal’s conditions are satisfied — wipes the plan, resets per-sub-goal accounting, increments current_subgoal_index, and re-enters the planner for the next stage.
from langgoap import GoapGraph
graph = GoapGraph(actions)
result = graph.invoke(
goal=goal,
world_state={**product_launch_start(), "product_name": "LangGOAP SaaS"},
)
print(f"status : {result['status']}")
print(f"final stage : {result['current_subgoal_index'] + 1} of {len(goal.goals)}")
print("\nworld state at the end:")
for k, v in sorted(result["world_state"].items()):
if isinstance(v, str) and len(v) > 80:
print(f" {k:<18s} = {v[:80]}...")
else:
print(f" {k:<18s} = {v}")
status : goal_achieved
final stage : 3 of 3
world state at the end:
code_written = True
launch_announcement = **FOR IMMEDIATE RELEASE**
**Unlock a World of Communication with LangGOAP SaaS:...
launched = True
market_data = True
market_research = **Market Analysis for LangGOAP SaaS**
**Product Description:**
LangGOAP is a So...
marketing_content = ### Marketing Brief for LangGOAP SaaS
**Value Proposition:**
LangGOAP SaaS revo...
marketing_ready = True
prd_approved = True
prd_content = # Product Requirements Document (PRD) for LangGOAP SaaS
## Problem Statement
La...
product_name = LangGOAP SaaS
qa_passed = True
for i, record in enumerate(result["execution_history"]):
print(f" step {i + 1:>2d} {record.action_name}")
step 1 research_market
step 2 write_prd
step 3 implement_features
step 4 qa_test
step 5 prepare_marketing
step 6 announce_launch
4. Observability: tracing sub-goal planning isolation#
A custom PlanningTracer records which sub-goal each plan was built for. In sequential mode, the tracer’s on_plan_start receives the effective GoalSpec (not the raw MultiGoal), so each stage plans in isolation — later stages are invisible during earlier stages.
from langgoap import NullTracer
class SubgoalTracer(NullTracer):
"""Record which sub-goal each plan was built for and what actions it contains."""
def __init__(self) -> None:
self.plans: list[tuple[tuple[str, ...], tuple[str, ...]]] = []
self._pending_goal: tuple[str, ...] | None = None
def on_plan_start(self, goal: Any, state: Any, strategy_name: str) -> None:
self._pending_goal = tuple(sorted(goal.conditions.keys()))
def on_plan_complete(self, plan: Any, duration_ms: float) -> None:
assert self._pending_goal is not None
self.plans.append((self._pending_goal, tuple(plan.action_names)))
self._pending_goal = None
tracer = SubgoalTracer()
traced_graph = GoapGraph(product_launch_actions(llm), tracer=tracer)
traced_graph.invoke(
goal=product_launch_goal(),
world_state={**product_launch_start(), "product_name": "LangGOAP SaaS"},
)
for i, (sub_keys, plan) in enumerate(tracer.plans):
print(f"stage {i + 1} sub-goal={sub_keys[0]!r}")
for step in plan:
print(f" {step}")
stage 1 sub-goal='prd_approved'
research_market
write_prd
stage 2 sub-goal='qa_passed'
implement_features
qa_test
stage 3 sub-goal='launched'
prepare_marketing
announce_launch
5. Shortcut behavior: pre-satisfied stages#
Neither research_market nor write_prd ran — stage 1’s observer check saw prd_approved=True in the starting state and advanced straight to stage 2. The four actions that did run are the full stage 2 and stage 3 sequences.
start = product_launch_start()
start["prd_approved"] = True # stage 1 already locked
shortcut_graph = GoapGraph(product_launch_actions(llm))
shortcut = shortcut_graph.invoke(
goal=product_launch_goal(),
world_state={**start, "product_name": "LangGOAP SaaS"},
)
print("executed actions (stage 1 already locked):")
for r in shortcut["execution_history"]:
print(f" {r.action_name}")
assert shortcut["status"] == "goal_achieved"
executed actions (stage 1 already locked):
implement_features
qa_test
prepare_marketing
announce_launch
6. Replanning on action failure#
When an action fails mid-stage, the observer detects the deviation and triggers replanning within the same sub-goal. The max_retries parameter on ActionSpec controls per-action retry attempts before the observer blacklists the action and re-enters the planner.
from langgoap import ActionSpec, GoalPolicy, GoalSpec, MultiGoal
qa_attempts = {"n": 0}
def flaky_qa(ws: dict[str, Any]) -> dict[str, Any]:
qa_attempts["n"] += 1
if qa_attempts["n"] == 1:
raise RuntimeError("transient QA flake")
return {"qa_passed": True}
# Swap in the flaky action, keep the other five.
flaky_actions = [
ActionSpec(
name=a.name,
preconditions=dict(a.preconditions),
effects=dict(a.effects),
cost=a.cost,
execute=flaky_qa if a.name == "qa_test" else a.execute,
max_retries=1 if a.name == "qa_test" else 0,
)
for a in product_launch_actions(llm)
]
tight_goal = MultiGoal(
goals=(
GoalSpec(conditions={"prd_approved": True}, policy=GoalPolicy(max_replans=1)),
GoalSpec(conditions={"qa_passed": True}, policy=GoalPolicy(max_replans=1)),
GoalSpec(conditions={"launched": True}, policy=GoalPolicy(max_replans=1)),
),
mode="sequential",
)
recovered = GoapGraph(flaky_actions).invoke(
goal=tight_goal,
world_state={**product_launch_start(), "product_name": "LangGOAP SaaS"},
)
print(f"status : {recovered['status']}")
print(f"launched : {recovered['world_state']['launched']}")
print(f"qa attempts : {qa_attempts['n']}")
print("\nfull execution history:")
for r in recovered["execution_history"]:
print(f" {r.action_name}")
Action 'qa_test' failed: transient QA flake
status : goal_achieved
launched : True
qa attempts : 2
full execution history:
research_market
write_prd
implement_features
qa_test
qa_test
prepare_marketing
announce_launch
Stage 2’s flaky action fired twice: one failure, one recovery. Stage 3 still reached launched=True even though its max_replans=1 budget was never touched. If the budget were cumulative across sub-goals, the moment stage 2 consumed its replan, stage 3 would enter its first plan with replan_count=1, and any hiccup at all would terminate the launch.
The per-sub-goal reset lives in GoapObserver._route at the sub-goal-advance branch. When the observer emits goto="planner" with replan_reason="subgoal_achieved", it also sets replan_count=0, blacklisted_actions=[], and action_failure_counts={}. The unit regression test tests/integration/test_multi_goal_loop.py::TestSubgoalAdvanceCommand pins this exact Command.update shape.
Summary#
Six actions. Three sub-goals. One graph.invoke call. LangGOAP’s MultiGoal expresses dependent, staged workflows without asking the user to manually juggle world state between A* invocations.
Key takeaways:
MultiGoal(goals=(...,), mode="sequential")chains sub-goals in declaration order.The planner resolves the
MultiGoalwrapper into the current sub-goal before running A*, so each stage plans in isolation. Later stages are invisible during an earlier stage.Sub-goal effects remain in the world state for the next stage, making hand-off automatic.
Every sub-goal advance resets
replan_count, the blacklist, and failure counts so an upstream problem cannot starve a downstream recovery.PlanningTracer.on_plan_startreceives the effectiveGoalSpecin sequential mode (not the rawMultiGoal), so observability tooling sees a plain goal per stage.
Next steps: compose MultiGoal with StoreExecutionHistory (notebook 11) to record one ExecutionRecord per sub-goal, or pair it with the CSP optimizer (notebooks 4–8) to run constraint satisfaction inside each stage.